ZeroRF: Fast Sparse View 360° Reconstruction with Zero Pretraining
{kind=link}
Abstract
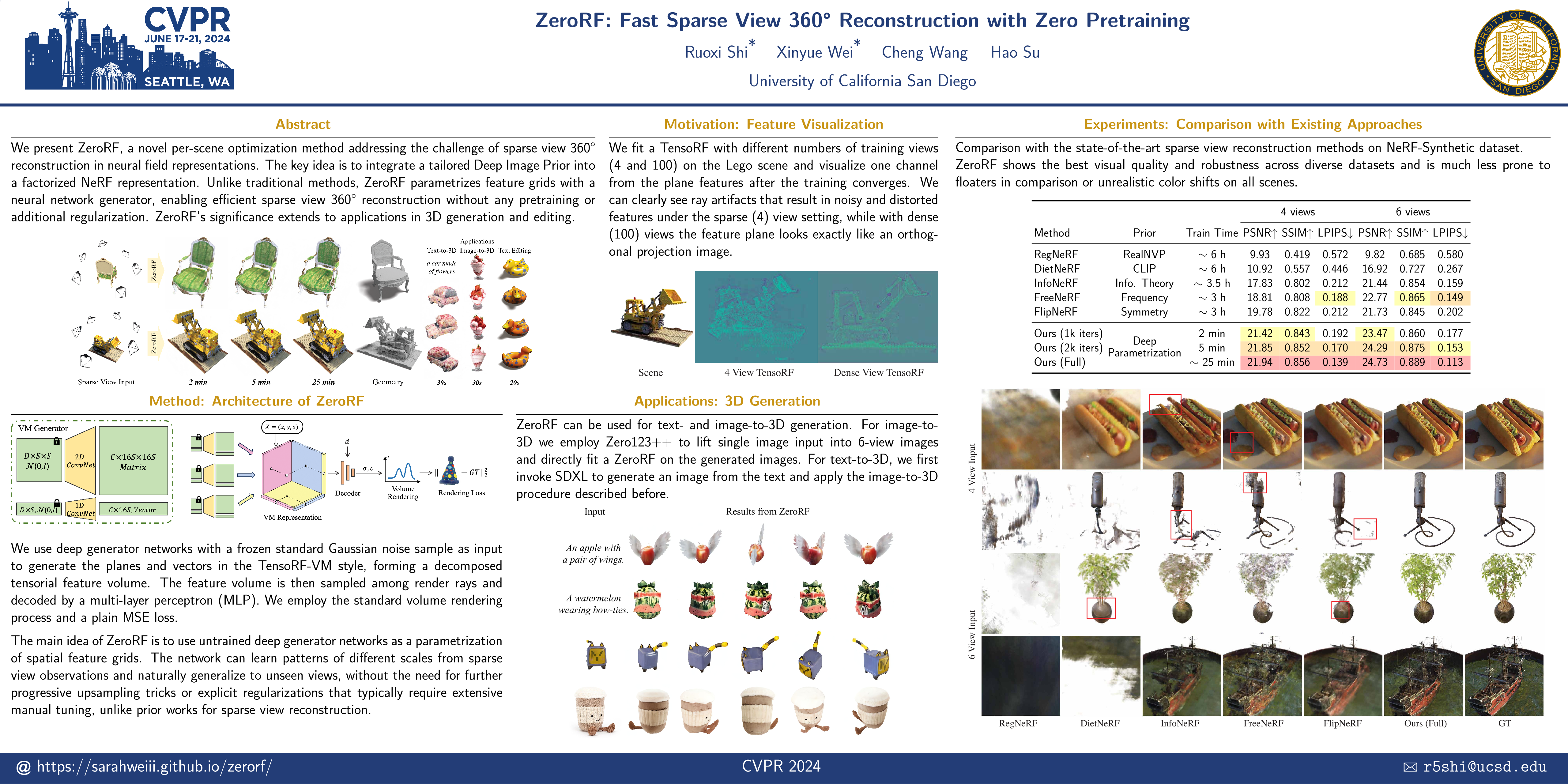
We present ZeroRF, a novel per-scene optimization method addressing the challenge of sparse view 360° reconstruction in neural field representations. Current breakthroughs like Neural Radiance Fields (NeRF) have demonstrated high-fidelity image synthesis but struggle with sparse input views. Existing methods, such as Generalizable NeRFs and per-scene optimization approaches, face limitations in data dependency, computational cost, and generalization across diverse scenarios.To overcome these challenges, we propose ZeroRF, whose key idea is to integrate a tailored Deep Image Prior into a factorized NeRF representation. Unlike traditional methods, ZeroRF parametrizes feature grids with a neural network generator, enabling efficient sparse view 360° reconstruction without any pretraining or additional regularization. Extensive experiments showcase ZeroRF's versatility and superiority in terms of both quality and speed, achieving state-of-the-art results on benchmark datasets.ZeroRF's significance extends to applications in 3D content generation and editing.We will release the code after the paper is published.