Adapting to Length Shift: FlexiLength Network for Trajectory Prediction
{kind=link}
Abstract
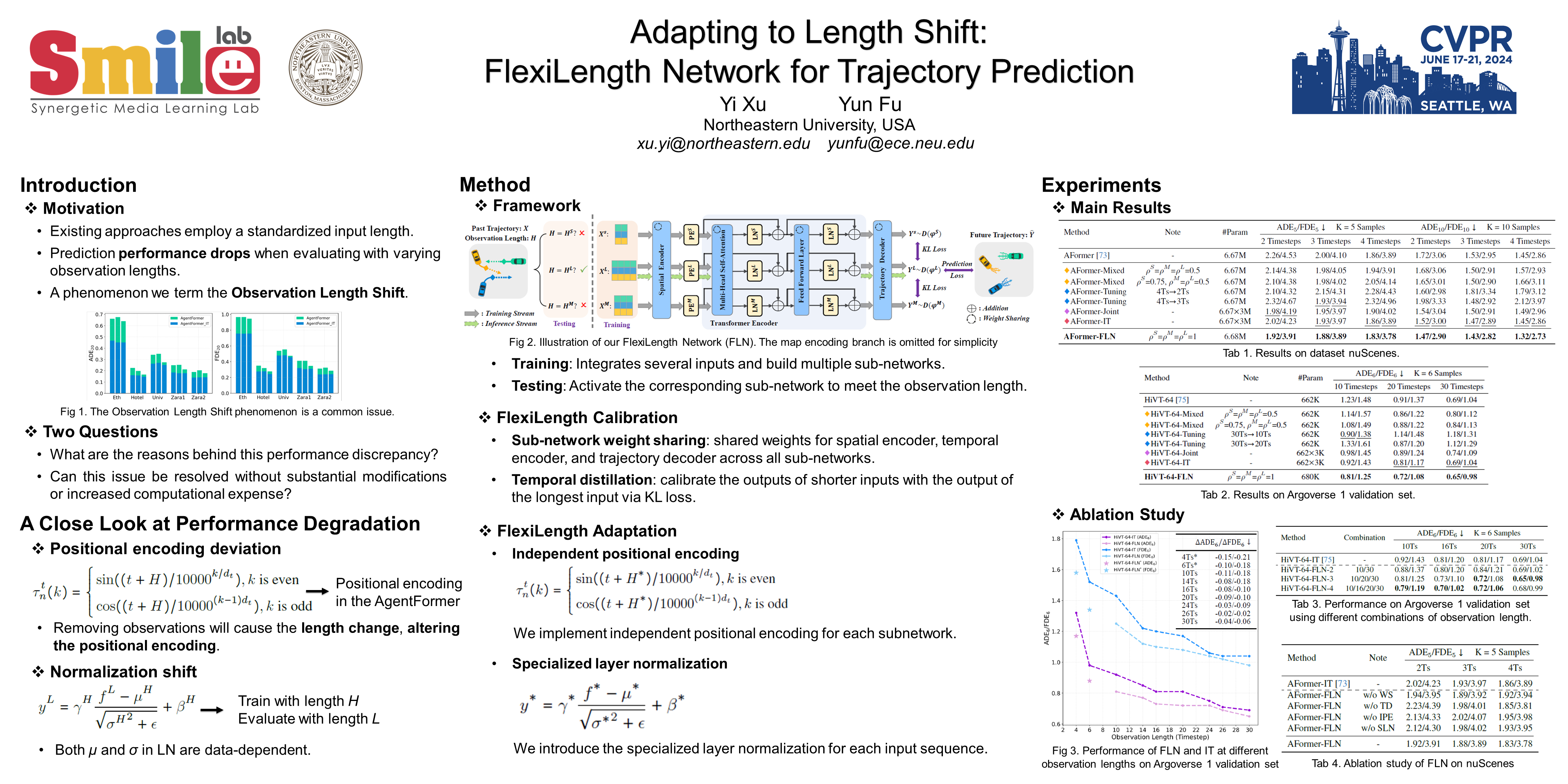
To be updatedTrajectory prediction plays a vital role in various applications, including autonomous driving, robotics, and scene understanding. Existing approaches mainly focus on developing compact neural networks to increase prediction precision on public datasets, typically employing a standardized input duration. However, a notable issue arises when these models are evaluated with varying observation lengths, leading to a significant performance drop, a phenomenon we term the Observation Length Shift. To tackle this issue, we introduce a general and effective framework, the FlexiLength Network (FLN), to enhance the robustness of existing trajectory prediction techniques against varying observation periods. Specifically, FLN integrates trajectory data with diverse observation lengths, incorporates FlexiLength Calibration (FLC) to acquire temporal invariant representations, and employs FlexiLength Adaptation (FLA) to further refine these representations for more accurate future trajectory predictions. Comprehensive experiments on multiple datasets, \ie, ETH/UCY, nuScenes, and Argoverse 1, demonstrate the effectiveness and flexibility of our proposed FLN framework.