Instance Tracking in 3D Scenes from Egocentric Videos
{kind=link}
Abstract
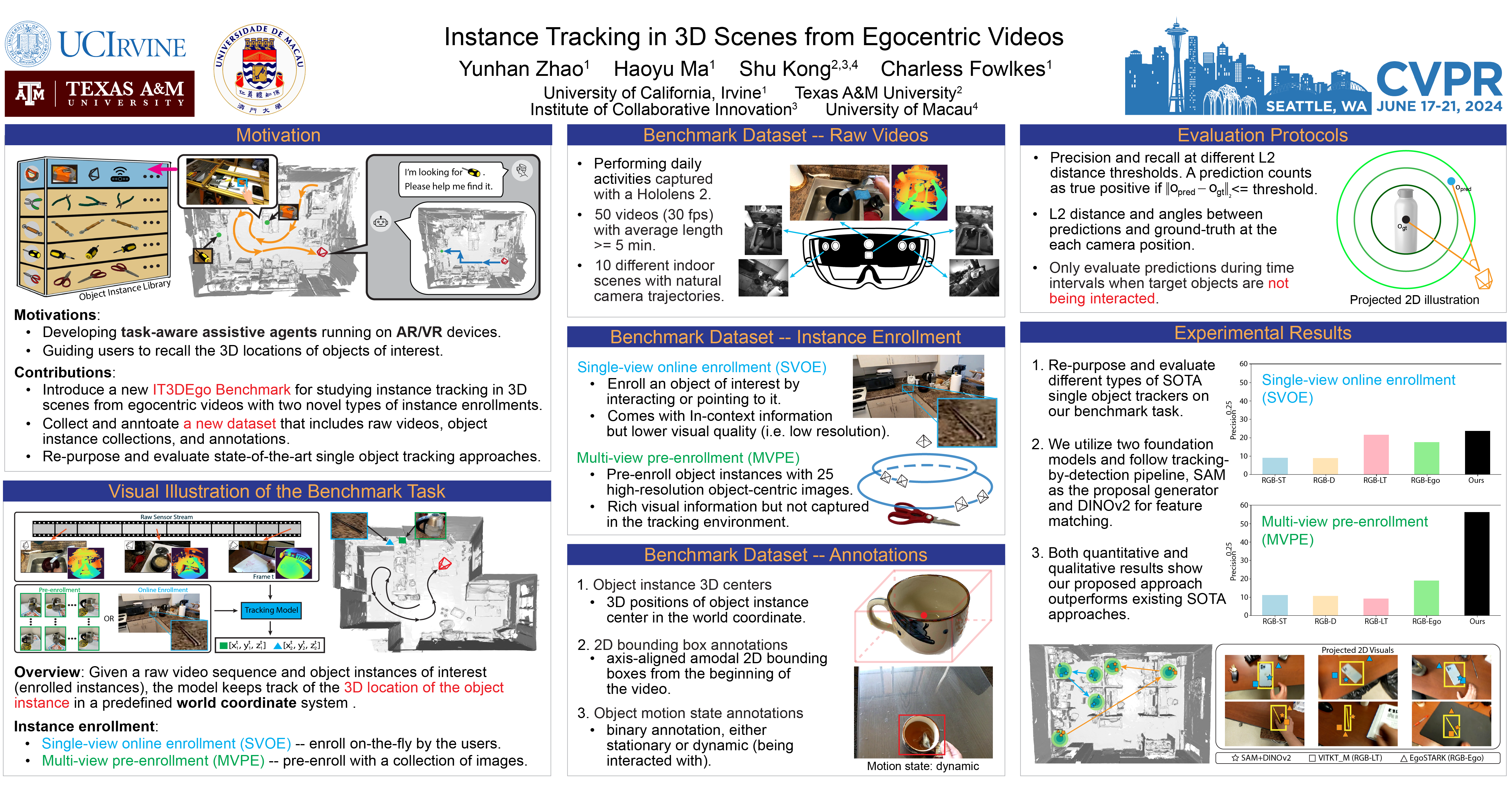
Egocentric sensors such as AR/VR devices capture human-object interactions and offer the potential to provide task-assistance by recalling 3D locations of objects of interest in the surrounding environment. This capability requires instance tracking in real-world 3D scenes from egocentric videos (IT3DEgo). We explore this problem by first introducing a new benchmark dataset, consisting of RGB and depth videos, per-frame camera pose, and instance-level annotations in both 2D camera and 3D world coordinates. We present an evaluation protocol which evaluates tracking performance in 3D coordinates with two settings for enrolling instances to track: (1) single-view online enrollment where an instance is specified on-the-fly based on the human wearer's interactions. and (2) multi-view pre-enrollment where images of an instance to be tracked are stored in memory ahead of time. To address IT3DEgo, we first re-purpose methods from relevant areas, e.g., single object tracking (SOT) -- running SOT methods to track instances in 2D frames and lifting them to 3D using camera pose and depth. We also present a simple method that leverages pretrained segmentation and detection models to generate proposals from RGB frames and match proposals with enrolled instance images. Our experiments show that our method (with no finetuning) significantly outperforms SOT-based approaches in the egocentric setting. We conclude by arguing that the problem of egocentric instance tracking is made easier by leveraging camera pose and using a 3D allocentric (world) coordinate representation.