Adaptive VIO: Deep Visual-Inertial Odometry with Online Continual Learning
{kind=link}
Abstract
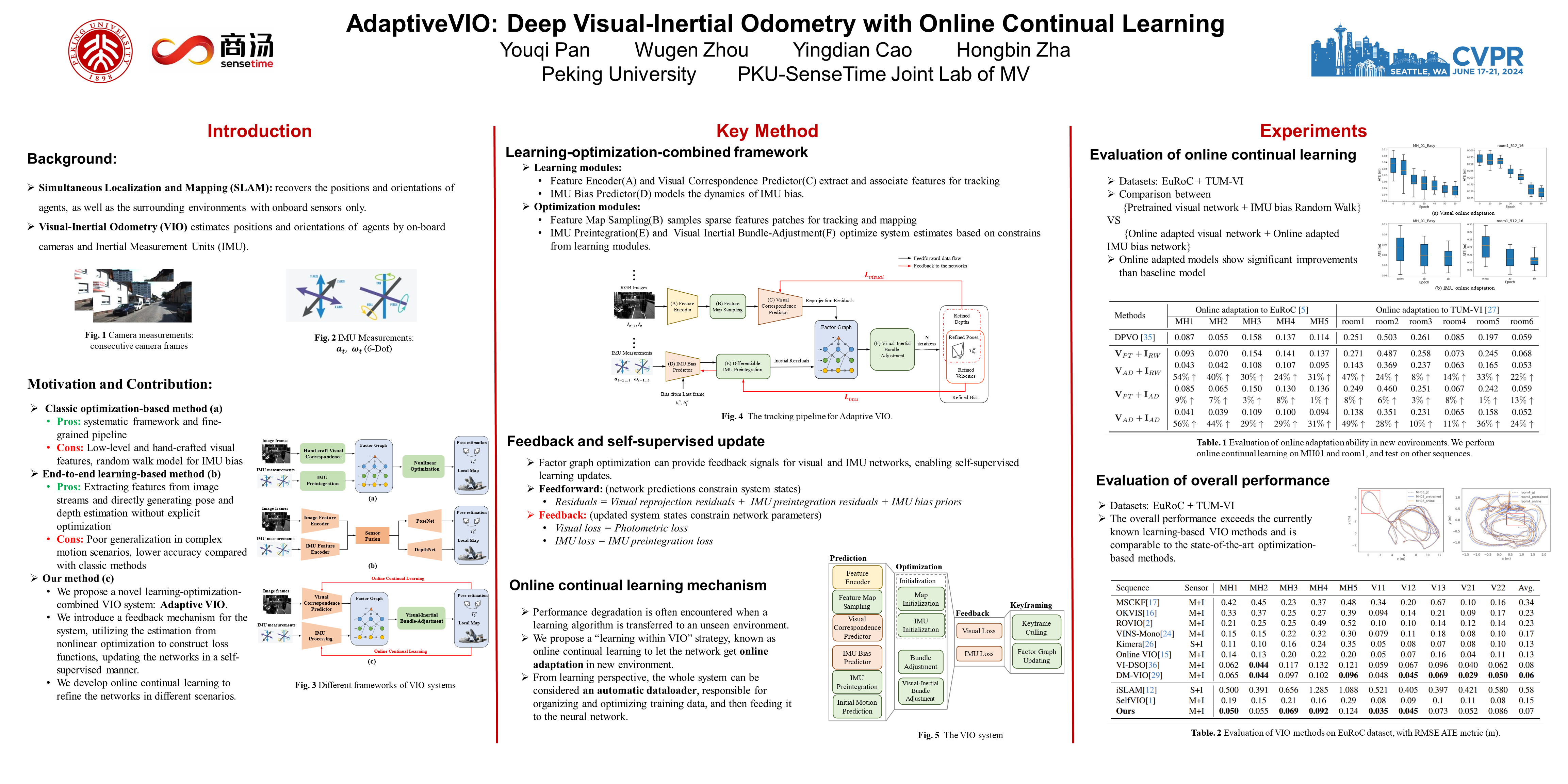
Visual-inertial odometry (VIO) has demonstrated remarkable success due to its low-cost and complementary sensors. However, existing VIO methods lack the generalization ability to adjust to different environments and sensor attributes. In this paper, we propose Adaptive VIO, a new monocular visual-inertial odometry that combines online continual learning with traditional nonlinear optimization. Adaptive VIO comprises two networks to predict visual correspondence and IMU bias. Unlike end-to-end approaches that use networks to fuse the features from two modalities (camera and IMU) and predict poses directly, we combine neural networks with visual-inertial bundle adjustment in our VIO system. The optimized estimates will be fed back to the visual and IMU bias networks, refining the networks in a self-supervised manner. Such a learning-optimization-combined framework and feedback mechanism enable the system to perform online continual learning. Experiments demonstrate that our Adaptive VIO manifests adaptive capability on EuRoC and TUM-VI datasets. The overall performance exceeds the currently known learning-based VIO methods and is comparable to the state-of-the-art optimization-based methods.