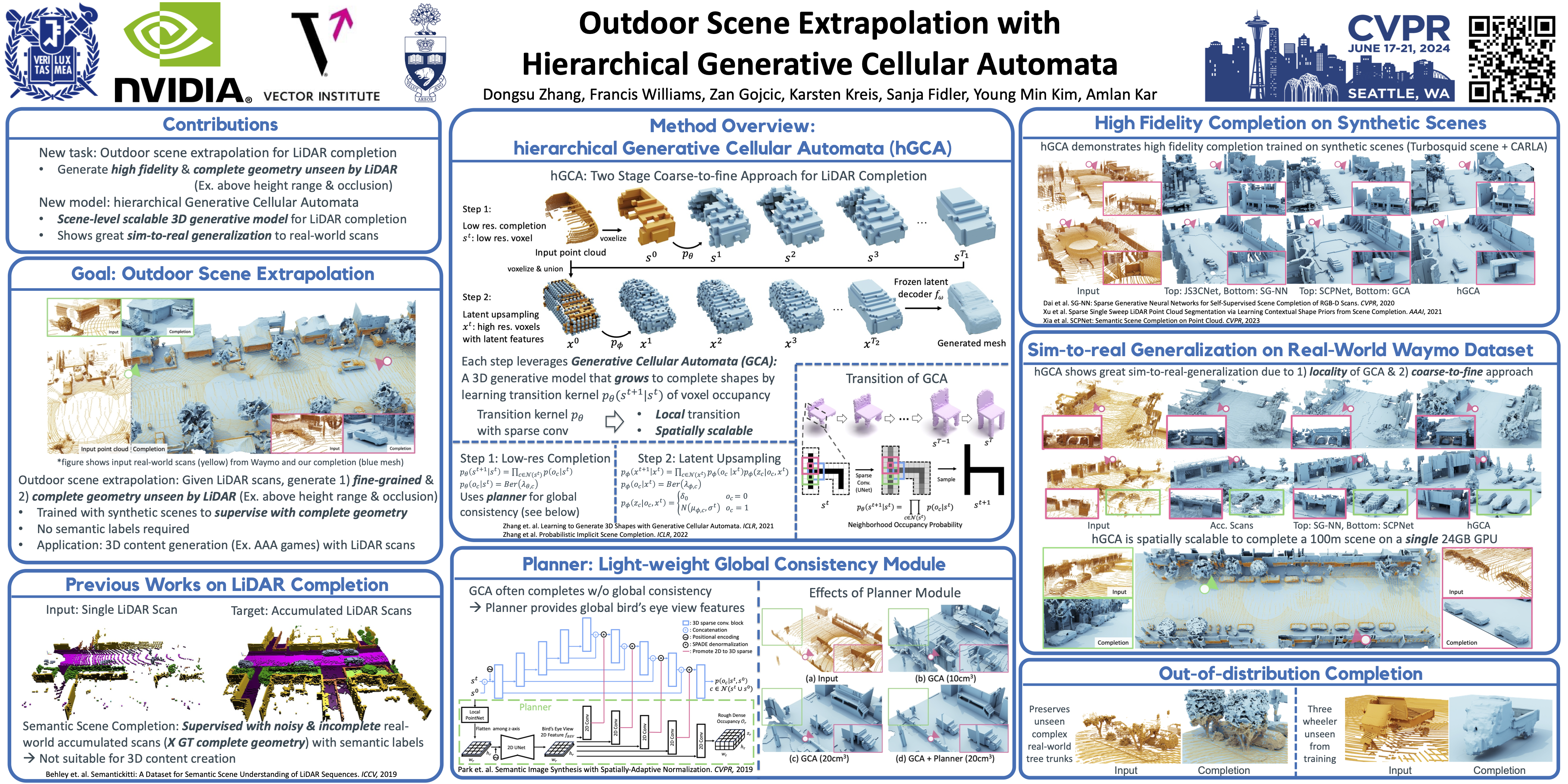
Outdoor Scene Extrapolation with Hierarchical Generative Cellular Automata
 Highlight
Highlight
{kind=link}
Abstract
We aim to generate fine-grained 3D geometry from large-scale sparse LiDAR scans, abundantly captured by autonomous vehicles (AV). Contrary to prior work on AV scene completion, we aim to extrapolate fine geometry from unlabeled and beyond spatial limits of LiDAR scans, taking a step towards generating realistic, high-resolution simulation-ready 3D street environments. We propose hierarchical Generative Cellular Automata (hGCA), a spatially scalable conditional 3D generative model, which grows geometry recursively with local kernels following GCAs, in a coarse-to-fine manner, equipped with a light-weight planner to induce global consistency. Experiments on synthetic scenes show that hGCA generates plausible scene geometry with higher fidelity and completeness compared to state-of-the-art baselines. Our model generalizes strongly from sim-to-real, qualitatively outperforming baselines on the Waymo-open dataset. We also show anecdotal evidence of the ability to create novel objects from real-world geometric cues even when trained on limited synthetic content.