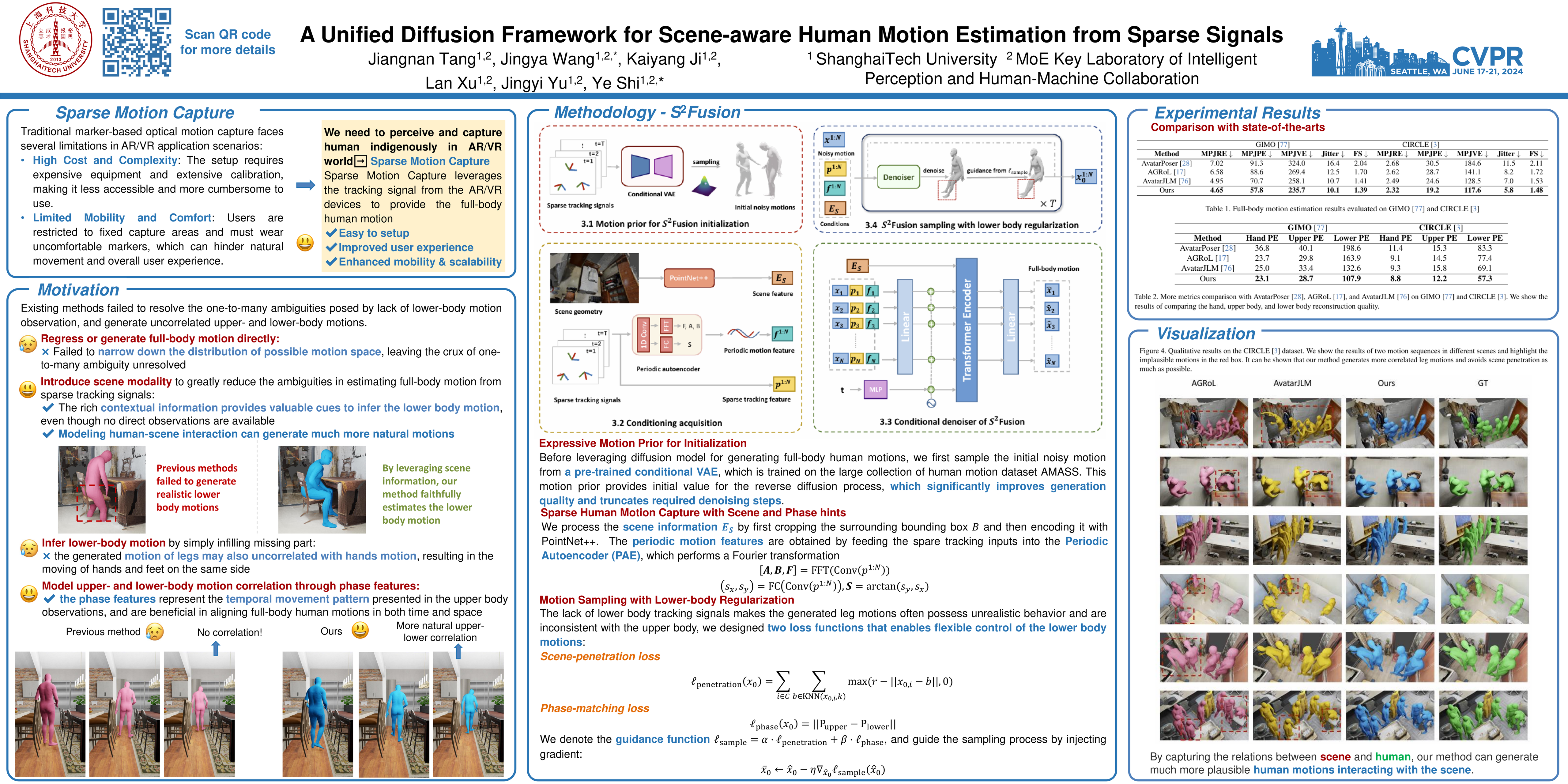
A Unified Diffusion Framework for Scene-aware Human Motion Estimation from Sparse Signals
Jiangnan Tang ⋅ Jingya Wang ⋅ Kaiyang Ji ⋅ Lan Xu ⋅ Jingyi Yu ⋅ Ye Shi
2024 Poster
{kind=link}
Abstract
Estimating full-body human motion via sparse tracking signals from head-mounted displays and hand controllers in 3D scenes is crucial to applications in AR/VR. One of the biggest challenges to this task is the one-to-many mapping from sparse observations to dense full-body motions, which endowed inherent ambiguities. To help resolve this ambiguous problem, we introduce a new framework to combine rich contextual information provided by scenes to benefit full-body motion tracking from sparse observations. To estimate plausible human motions given sparse tracking signals and 3D scenes, we develop $\text{S}^2$Fusion, a unified framework fusing scene and sparse signals with a conditional diffusion model. $\text{S}^2$Fusion first extracts the spatial-temporal relations resided in the sparse signals via a periodic autoencoder, and then produces time-alignment feature embedding as additional inputs. Subsequently, by drawing initial noisy motion from a pre-trained prior, $\text{S}^2$Fusion utilizes conditional diffusion to fuse scene geometry and sparse tracking signals to generate full-body scene-aware motions. The sampling procedure of $\text{S}^2$Fusion is further guided by a specially designed scene-penetration loss and phase-matching loss, which effectively regularizes the motion of the lower body even in the absence of any tracking signals, making generated motion much more plausible and coherent. Extensive experimental results have demonstrated that our $\text{S}^2$Fusion outperforms the state-of-the-art in terms of estimation quality and smoothness.
Chat is not available.
Successful Page Load