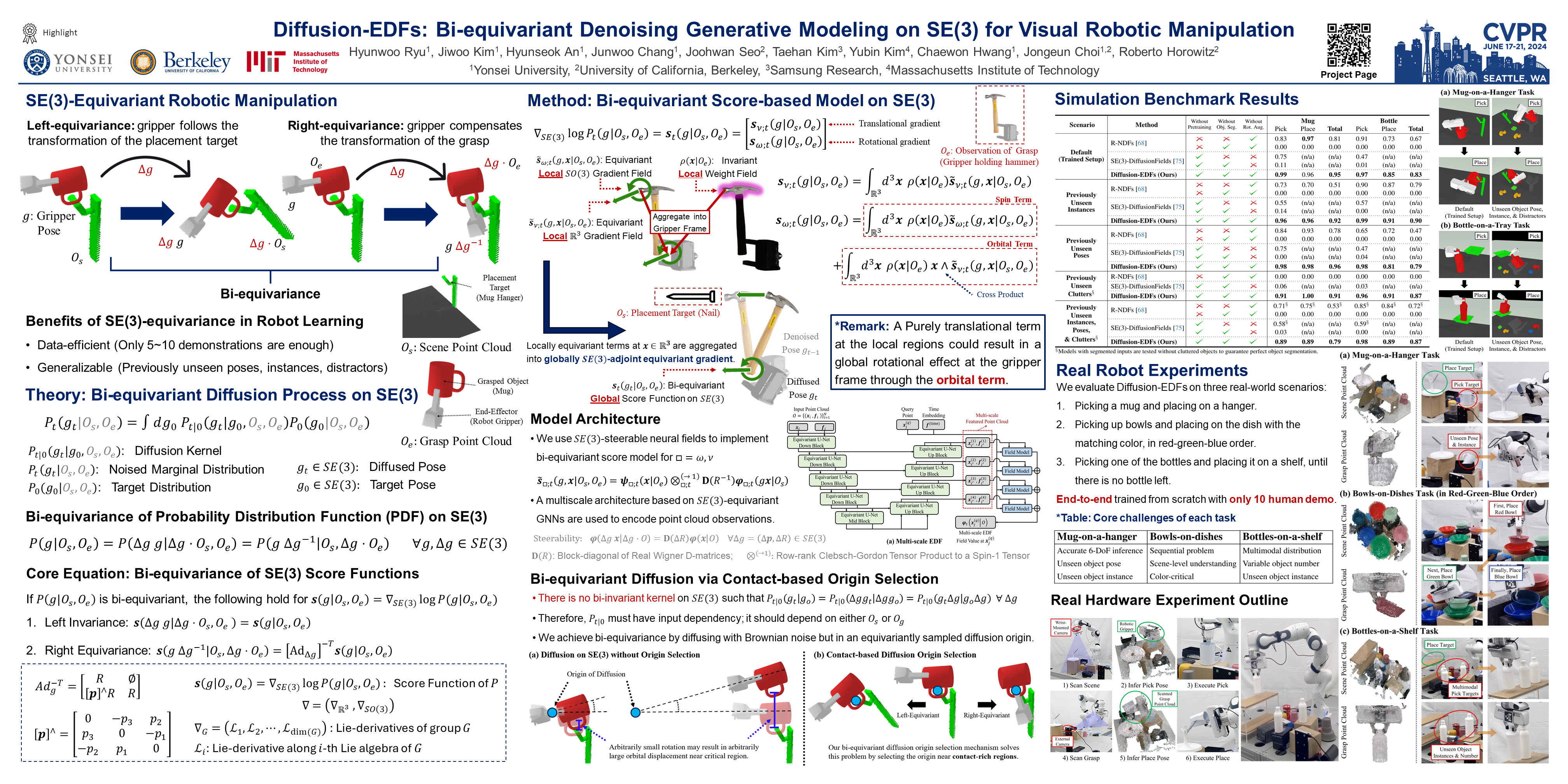
Diffusion-EDFs: Bi-equivariant Denoising Generative Modeling on SE(3) for Visual Robotic Manipulation
Hyunwoo Ryu ⋅ Jiwoo Kim ⋅ Hyunseok An ⋅ Junwoo Chang ⋅ Joohwan Seo ⋅ Taehan Kim ⋅ Yubin Kim ⋅ Chaewon Hwang ⋅ Jongeun Choi ⋅ Roberto Horowitz
 Highlight
Highlight
2024 Poster
{kind=link}
Abstract
Diffusion generative modeling has become a promising approach for learning robotic manipulation tasks from stochastic human demonstrations. In this paper, we present Diffusion-EDFs, a novel SE(3)-equivariant diffusion-based approach for visual robotic manipulation tasks. We show that our proposed method achieves remarkable data efficiency, requiring only 5 to 10 human demonstrations for effective end-to-end training in less than an hour. Furthermore, our benchmark experiments demonstrate that our approach has superior generalizability and robustness compared to state-of-the-art methods. Lastly, we validate our methods with real hardware experiments. The codes will be released upon acceptance.
Chat is not available.
Successful Page Load