HIMap: HybrId Representation Learning for End-to-end Vectorized HD Map Construction
{kind=link}
Abstract
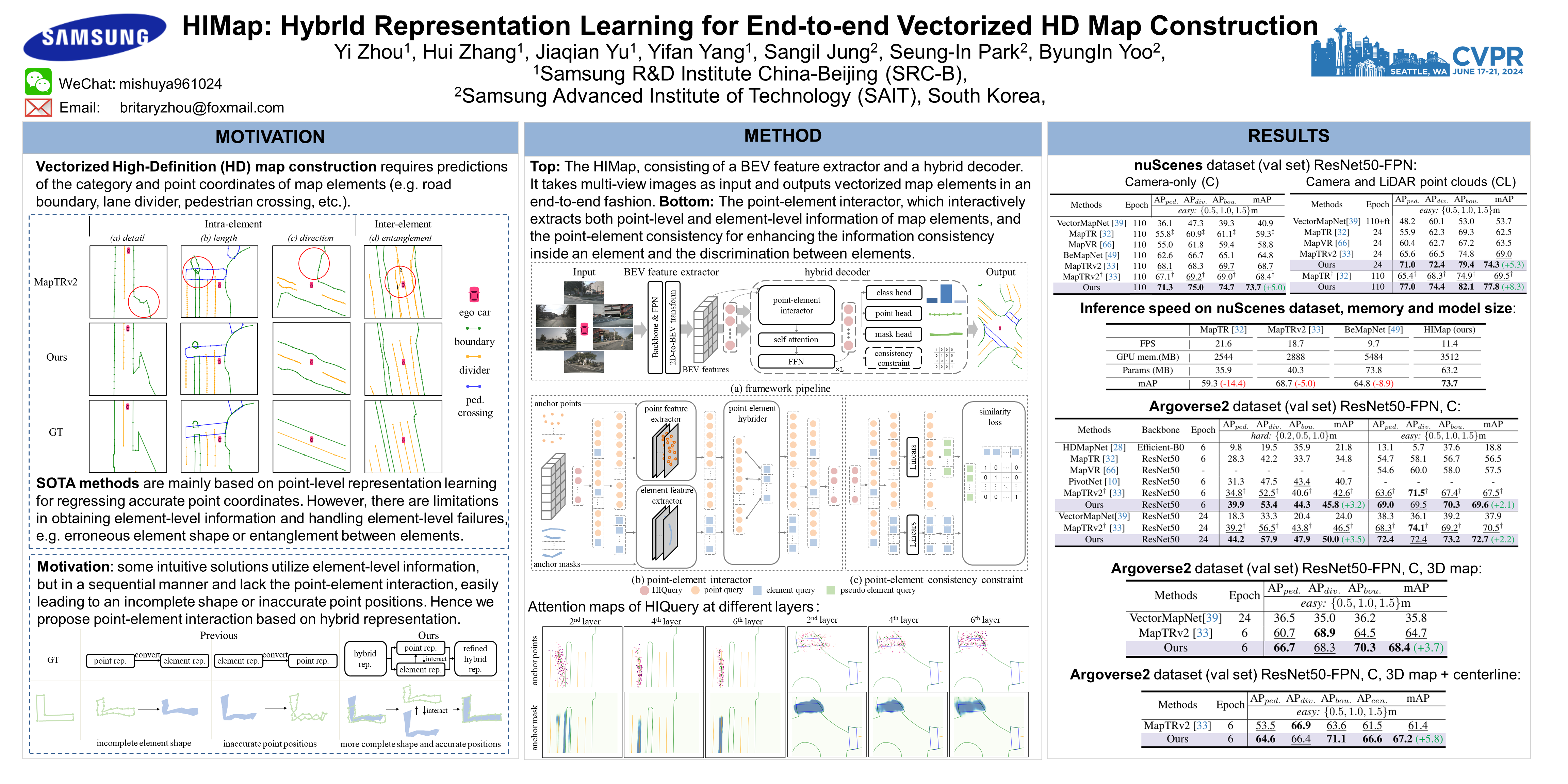
Vectorized High-Definition (HD) map construction requires predictions of the category and point coordinates of map elements (e.g. road boundary, lane divider, pedestrian crossing, etc.). State-of-the-art methods are mainly based on point-level representation learning for regressing accurate point coordinates. However, this pipeline has limitations in obtaining element-level information and handling element-level failures, e.g. erroneous element shape or entanglement between elements. To tackle the above issues, we propose a simple yet effective HybrId framework named HIMap to sufficiently learn and interact both point-level and element-level information. Concretely, we introduce a hybrid representation called HIQuery to represent all map elements, and propose a point-element interactor to interactively extract and encode the hybrid information of elements, e.g. point position and element shape, into the HIQuery. Additionally, we present a point-element consistency constraint to enhance the consistency between the point-level and element-level information. Finally, the output point-element integrated HIQuery can be directly converted into map elements’ class, point coordinates, and mask. We conduct extensive experiments and consistently outperform previous methods on both nuScenes and Argoverse2 datasets. Notably, our method achieves 77.8 mAP on the nuScenes dataset, remarkably superior to previous SOTAs by 8.3 mAP at least.