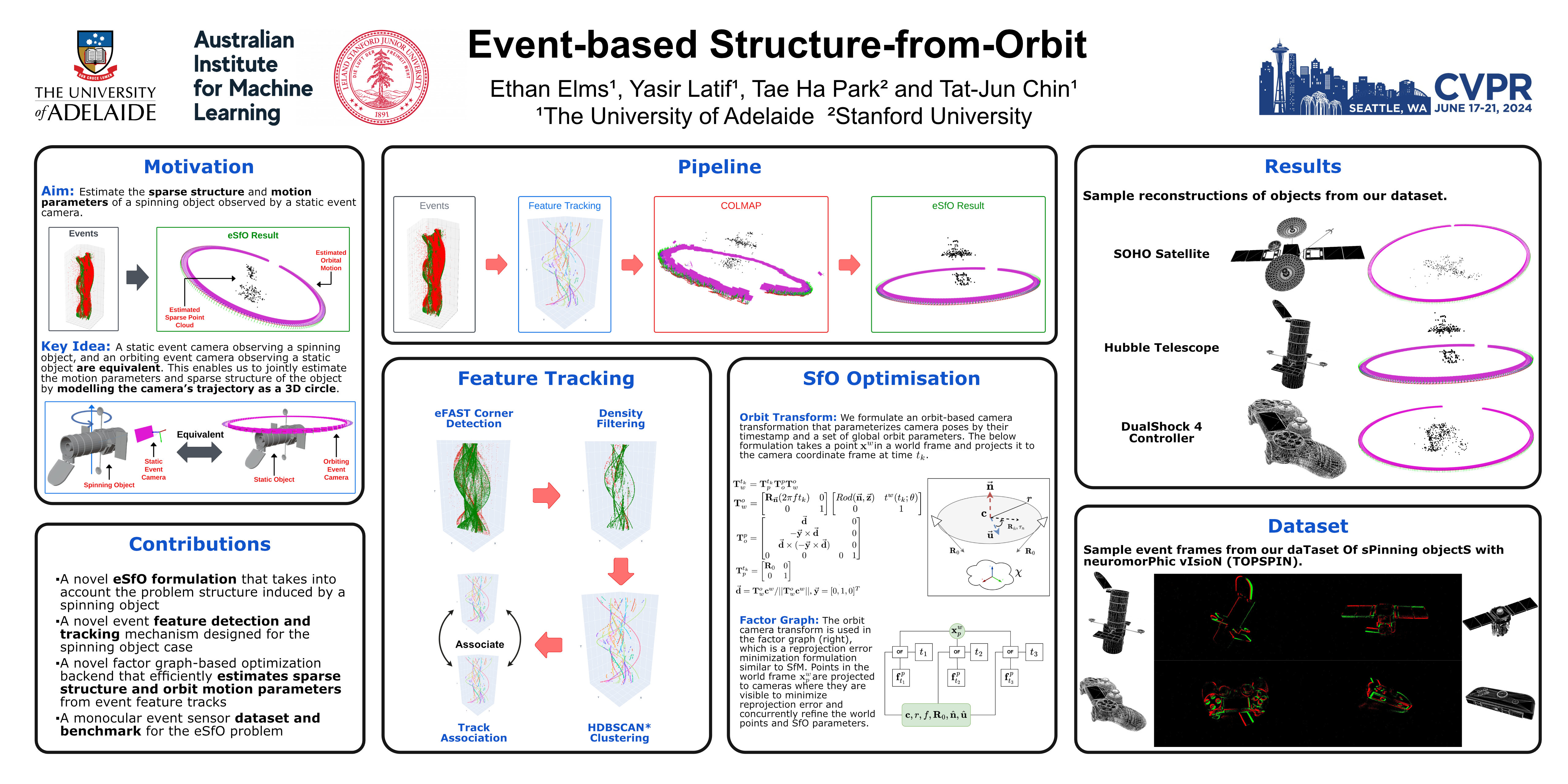
Event-based Structure-from-Orbit
 Highlight
Highlight
{kind=link}
Abstract
Event sensors offer high temporal resolution visual sensing, which makes them ideal for perceiving fast visual phenomena without suffering from motion blur. Certain applications in robotics and vision-based navigation require 3D perception of an object undergoing circular or spinning motion in front of a static camera, such as recovering the angular velocity and shape of the object. The setting is equivalent to observing a static object with an orbiting camera. In this paper, we propose event-based structure-from-orbit (eSfO), where the aim is to simultaneously reconstruct the 3D structure of a fast spinning object observed from a static event camera, and recover the equivalent orbital motion of the camera. Our contributions are threefold: since state-of-the-art event feature trackers cannot handle periodic self-occlusion due to the spinning motion, we develop a novel event feature tracker based on spatio-temporal clustering and data association that can better track the helical trajectories of valid features in the event data. The feature tracks are then fed to our novel factor graph-based structure-from-orbit back-end that calculates the orbital motion parameters (e.g., spin rate, relative rotational axis) that minimize the reprojection error. For evaluation, we produce a new event dataset of objects under spinning motion. Comparisons against ground truth indicate the efficacy of eSfO.