GAFusion: Adaptive Fusing LiDAR and Camera with Multiple Guidance for 3D Object Detection
{kind=link}
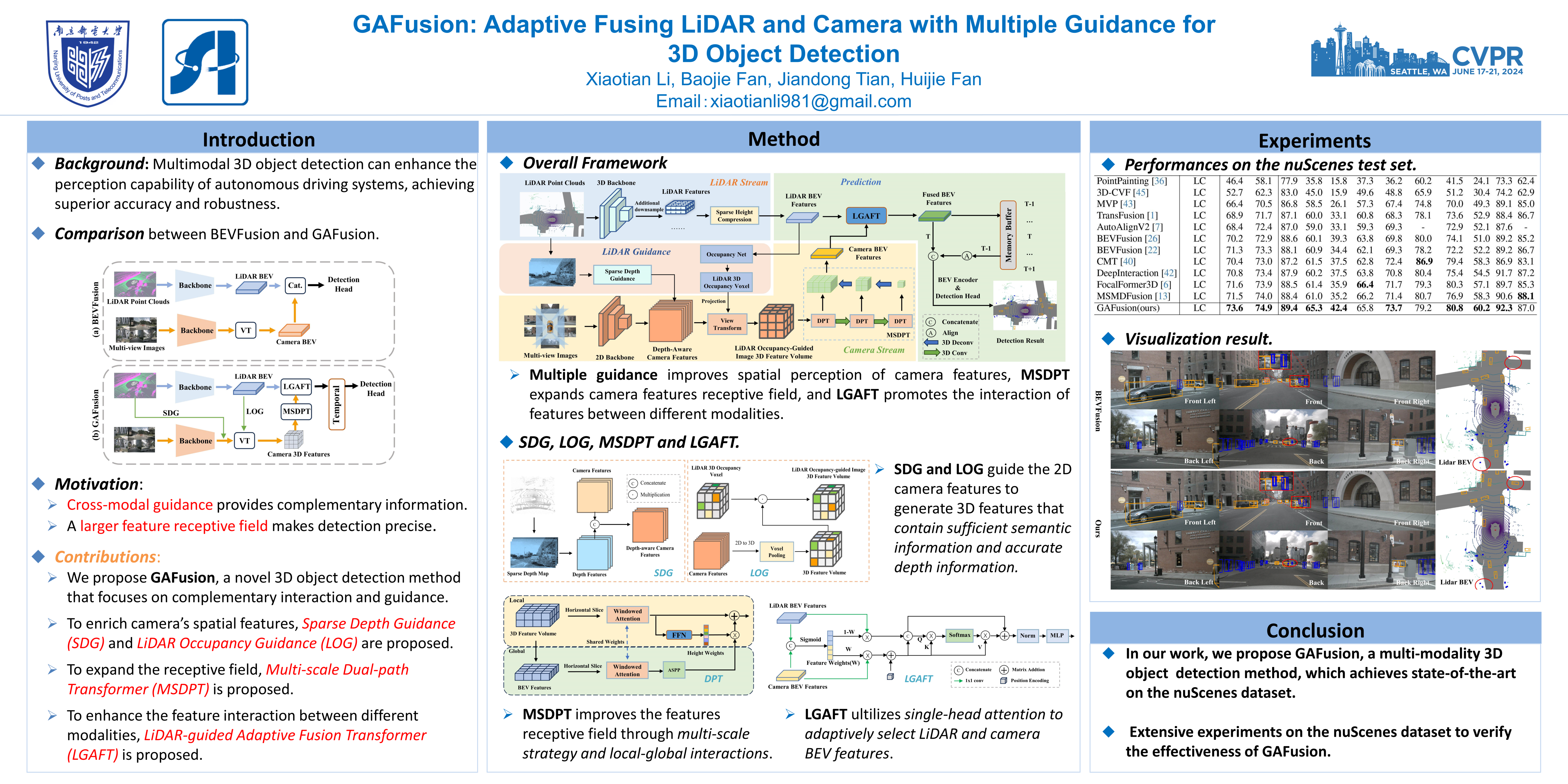
Abstract
Recent years have witnessed the remarkable progress of 3D multi-modality object detection methods based on the Bird's-Eye-View (BEV) perspective. However, most of them overlook the complementary interaction and guidance between LiDAR and camera. In this work, we propose a novel multi-modality 3D objection detection method, named GAFusion, with LiDAR-guided global interaction and adaptive fusion. Specifically, we introduce sparse depth guidance (SDG) and LiDAR occupancy guidance (LOG) to generate 3D features with sufficient depth information. In the following, LiDAR-guided adaptive fusion transformer (LGAFT) is developed to adaptively enhance the interaction of different modal BEV features from a global perspective. Meanwhile, additional downsampling with sparse height compression and multi-scale dual-path transformer (MSDPT) are designed to enlarge the receptive fields of different modal features. Finally, a temporal fusion module is introduced to aggregate features from previous frames. GAFusion achieves state-of-the-art 3D object detection results with 73.6% mAP and 74.9% NDS on the nuScenes test set.