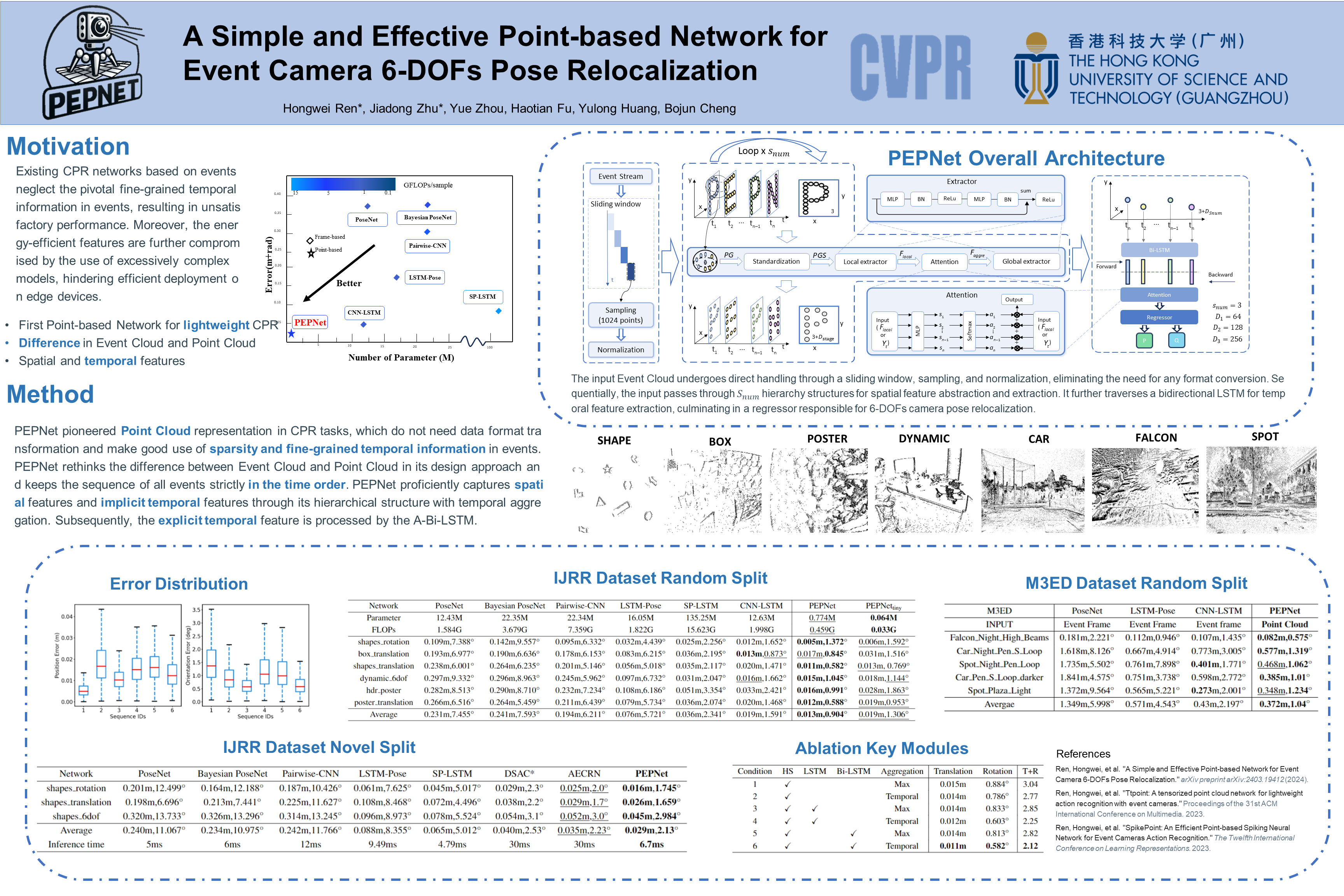
A Simple and Effective Point-based Network for Event Camera 6-DOFs Pose Relocalization
Hongwei Ren ⋅ Jiadong Zhu ⋅ Yue Zhou ⋅ Haotian FU ⋅ Yulong Huang ⋅ Bojun Cheng
2024 Poster
{kind=link}
Abstract
Event cameras exhibit remarkable attributes such as high dynamic range, asynchronicity, and low latency, making them highly suitable for vision tasks that involve high-speed motion in challenging lighting conditions. These cameras implicitly capture movement and depth information in events, making them appealing sensors for Camera Pose Relocalization (CPR) tasks. Nevertheless, existing CPR networks based on events neglect the pivotal fine-grained temporal information in events, resulting in unsatisfactory performance. Moreover, the energy-efficient features are further compromised by the use of excessively complex models, hindering efficient deployment on edge devices. In this paper, we introduce PEPNet, a simple and effective point-based network designed to regress six degrees of freedom (6-DOFs) event camera poses. We rethink the relationship between the event camera and CPR tasks, leveraging the raw point cloud directly as network input to harness the high-temporal resolution and inherent sparsity of events. PEPNet is adept at abstracting the spatial and implicit temporal features through hierarchical structure and explicit temporal features by Attentive Bi-directional Long Short-Term Memory (A-Bi-LSTM). By employing a carefully crafted lightweight design, PEPNet delivers state-of-the-art (SOTA) performance on public datasets with meager computational resources. Specifically, PEPNet attains a significant 38\% performance improvement on the random split DAVIS 240C CPR Dataset, utilizing merely 6\% of the parameters compared to traditional frame-based approaches. Moreover, the lightweight design version PEPNet$_{tiny}$ accomplishes results comparable to the SOTA while employing a mere 0.5\% of the parameters.
Chat is not available.
Successful Page Load