MRC-Net: 6-DoF Pose Estimation with MultiScale Residual Correlation
{kind=link}
Abstract
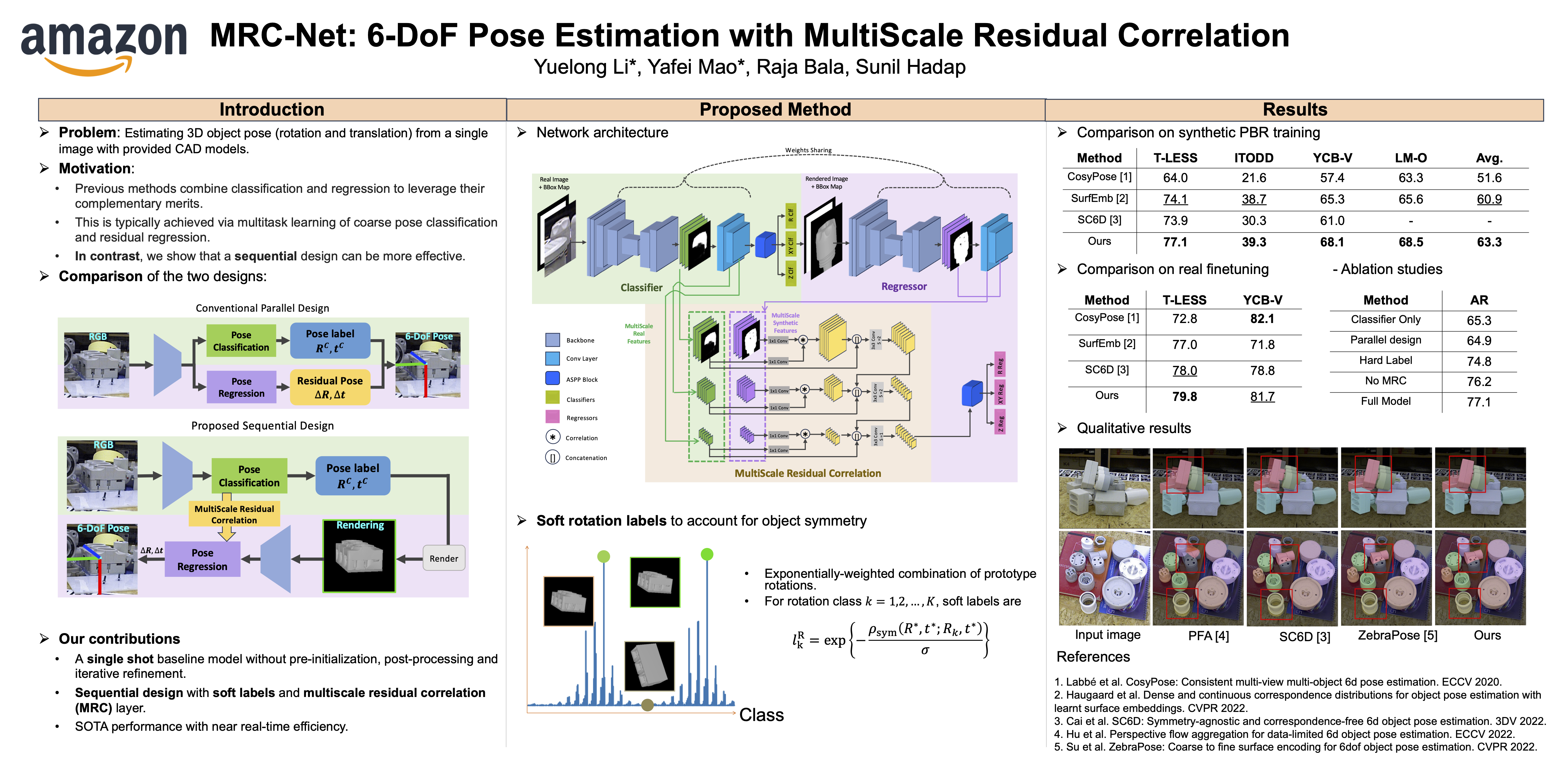
We propose a single-shot approach to determining 6 DoF pose of an object with available 3D CAD model from a single RGB image. Our method, dubbed MRC-Net, comprises two stages. The first performs pose classification and renders the 3D object in the classified pose. The second stage performs regression to predict fine-grained relative pose within class. Connecting the two stages is a novel multi-scale residual correlation (MRC) layer that captures high-and-low level correspondences between the input image and rendering from first stage. MRC-Net employs a Siamese network with shared weights between both stages to learn embeddings for input and rendered images. To mitigate ambiguity when predicting discrete pose class labels on symmetric objects, we use soft probabilistic labels to define pose class in the first stage. We demonstrate state-of-the-art accuracy, outperforming all competing RGB-based methods on four challenging BOP benchmark datasets: T-LESS, LM-O, YCB-V, and ITODD. Our method is non-iterative and requires no complex post-processing.