Dynamic Inertial Poser (DynaIP): Part-Based Motion Dynamics Learning for Enhanced Human Pose Estimation with Sparse Inertial Sensors
{kind=link}
Abstract
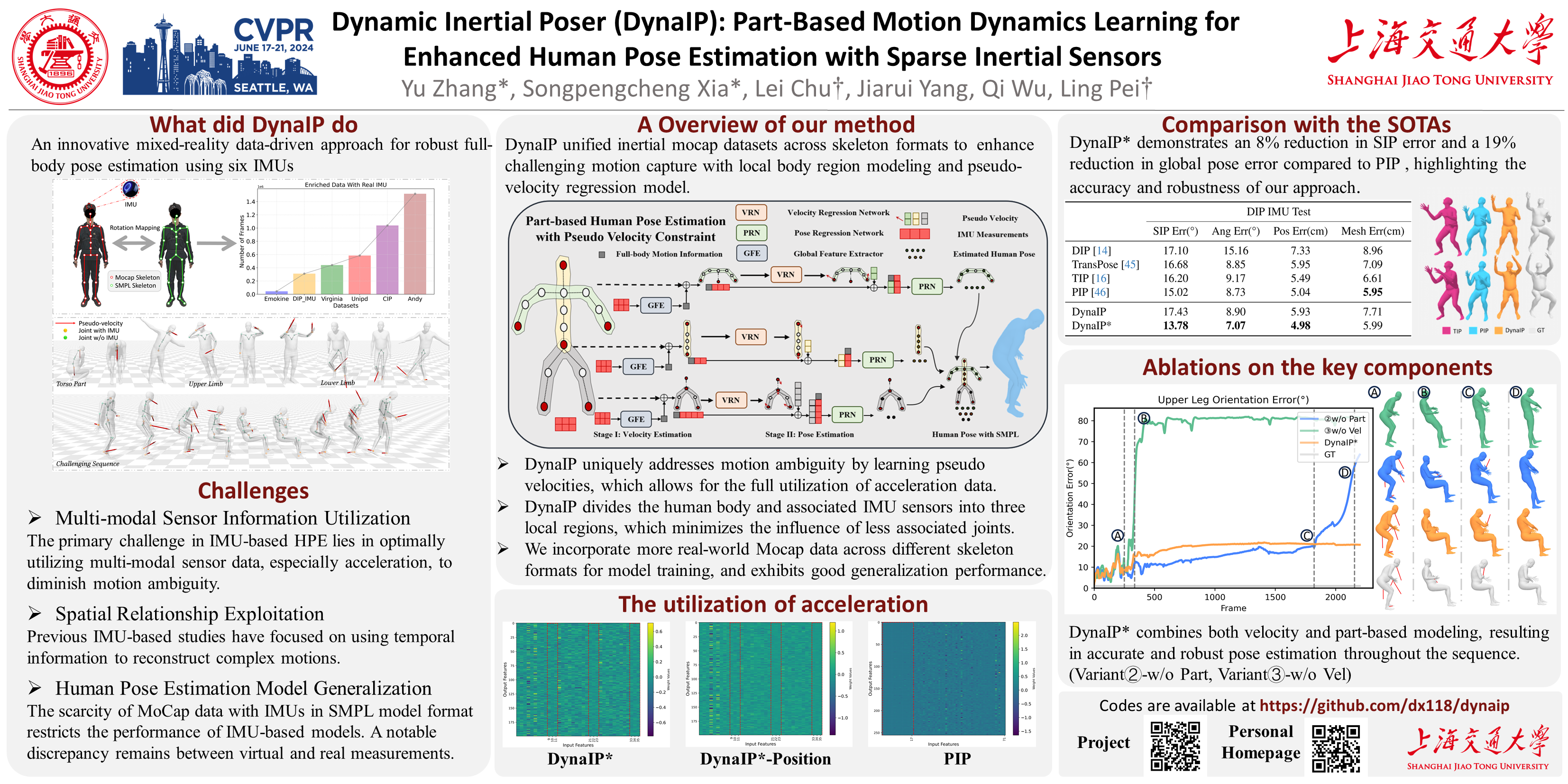
This paper introduces a novel human pose estimation approach using sparse inertial sensors, addressing the shortcomings of previous methods reliant on synthetic data. It leverages a diverse array of real inertial motion capture data from different skeleton formats to improve motion diversity and model generalization. This method features two innovative components: a pseudo-velocity regression model for dynamic motion capture with inertial sensors, and a part-based model dividing the body and sensor data into three regions, each focusing on their unique characteristics. The approach demonstrates superior performance over state-of-the-art models across five public datasets, notably reducing pose error by 19% on the DIP-IMU dataset, thus representing a significant improvement in inertial sensor-based human pose estimation. Our codes are available at https://github.com/dx118/dynaip