3D LiDAR Mapping in Dynamic Environments using a 4D Implicit Neural Representation
{kind=link}
Abstract
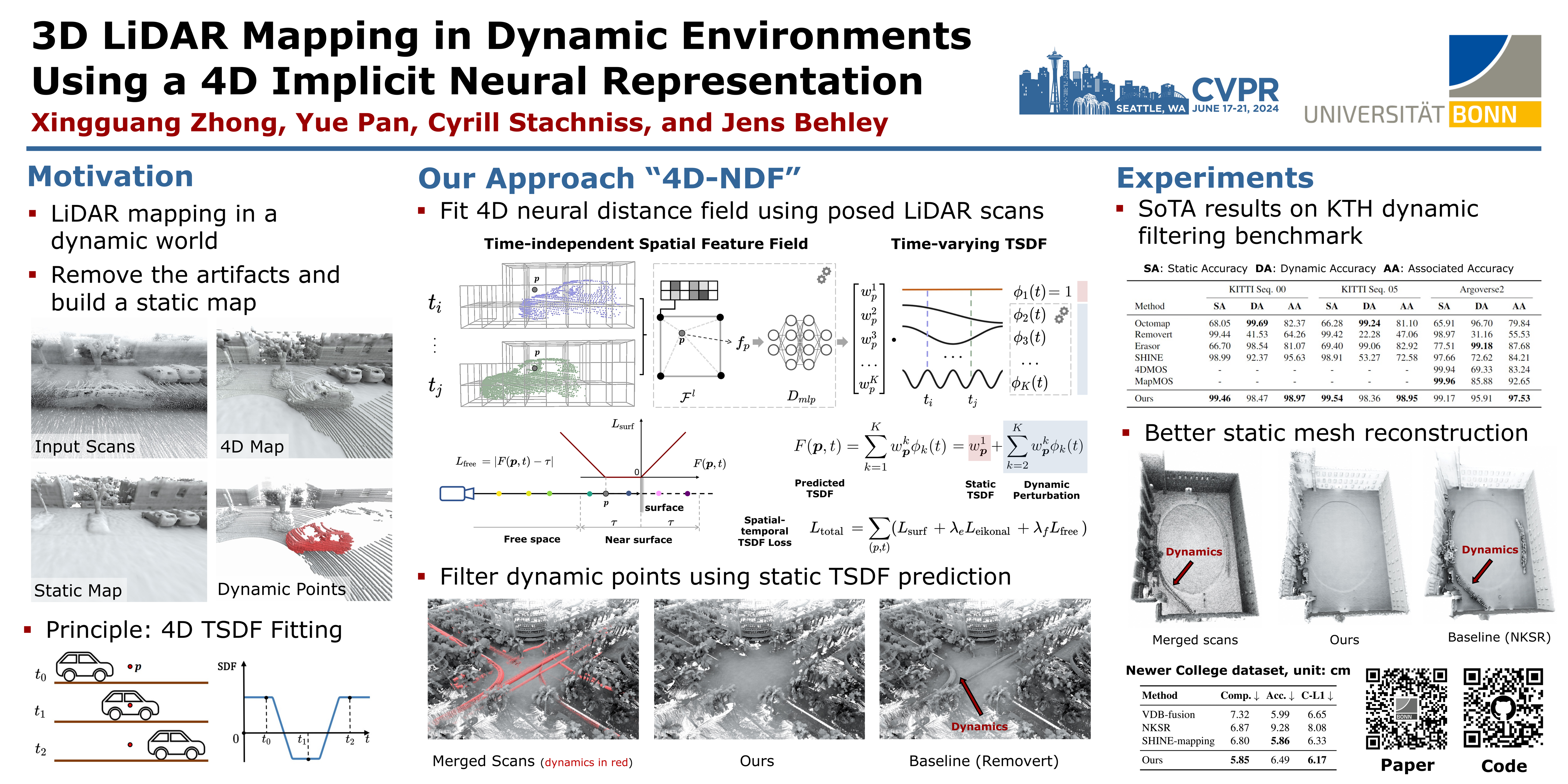
Building accurate maps is a key building block to enable reliable localization, planning, and navigation of autonomous vehicles. We propose a novel approach for building accurate 3D maps of dynamic environments utilizing a sequence of LiDAR scans. To this end, we propose encoding the 4D scene into a novel spatio-temporal implicit neural map representation by fitting a time-dependent truncated signed distance function to each point. Using our representation, we can extract the static map by filtering the dynamic parts. Our neural representation is based on sparse feature grids, a globally shared decoder, and time-dependent basis functions, which can be jointly optimized in an unsupervised fashion. To learn this representation from a sequence of LiDAR scans, we design a simple yet efficient loss function to supervise the map optimization in a piecewise way. We evaluate our approach on various scenes containing moving objects in terms of the reconstruction quality of static maps and the segmentation of dynamic point clouds. The experimental results demonstrate that our method is capable of removing the dynamic part of the input point clouds while reconstructing accurate and complete large-scale 3D maps outperforming several state-of-the-art methods for static map generation and scene reconstruction.