Producing and Leveraging Online Map Uncertainty in Trajectory Prediction
{kind=link}
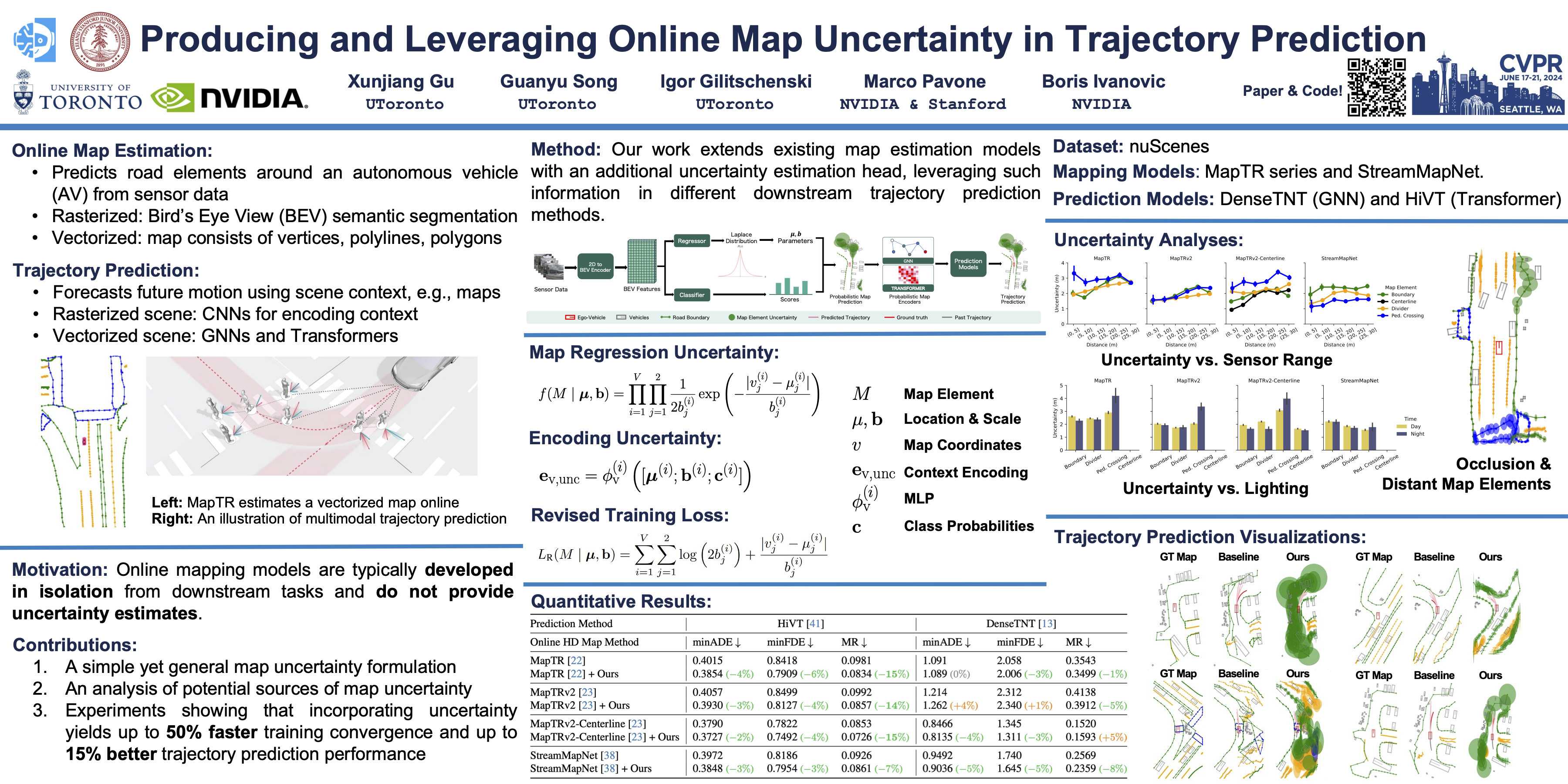
Abstract
High-definition (HD) maps have played an integral role in the development of modern autonomous vehicle (AV) stacks, albeit with high associated labeling and maintenance costs. As a result, many recent works have proposed methods for estimating HD maps online from sensor data, enabling AVs to operate outside of previously-mapped regions. However, current online map estimation approaches are developed in isolation of their downstream tasks, complicating their integration in AV stacks. In particular, they do not produce uncertainty or confidence estimates. In this work, we extend multiple state-of-the-art online map estimation methods to additionally output uncertainty estimates and show how they enable more tightly integrating online mapping with trajectory forecasting. In doing so, we find that incorporating uncertainty yields up to 50% faster training convergence and up to 15% better prediction performance on the real-world nuScenes driving dataset.