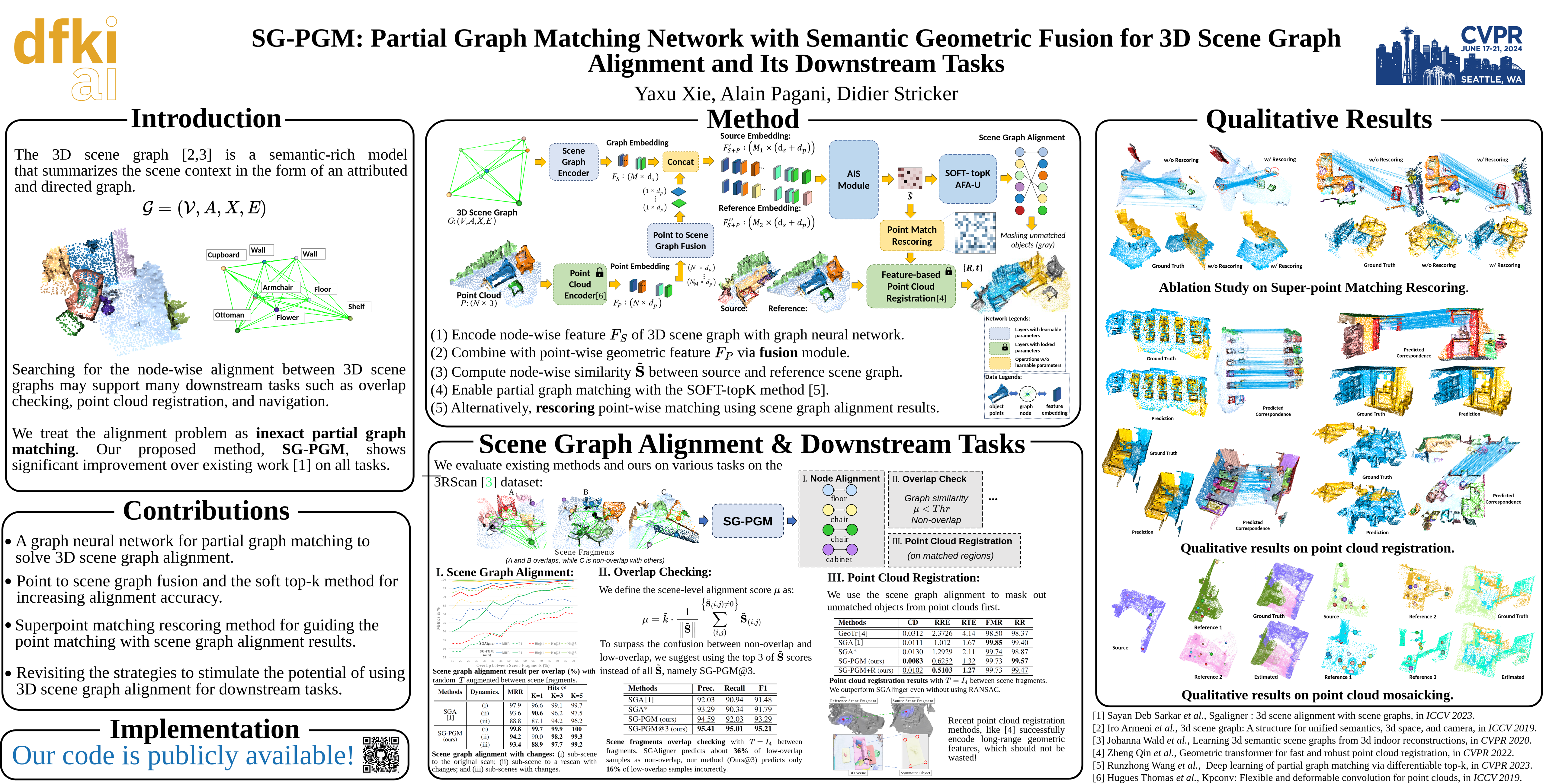
SG-PGM: Partial Graph Matching Network with Semantic Geometric Fusion for 3D Scene Graph Alignment and Its Downstream Tasks
Yaxu Xie ⋅ Alain Pagani ⋅ Didier Stricker
2024 Poster
{kind=link}
Abstract
Scene graphs have been recently introduced into 3D spatial understanding as a comprehensive representation of the scene.The alignment between 3D scene graphs is the first step of many downstream tasks such as scene graph aided point cloud registration, mosaicking, overlap checking, and robot navigation. In this work, we treat 3D scene graph alignment as a partial graph-matching problem and propose to solve it with a graph neural network. We reuse the geometric features learned by a point cloud registration method and associate the clustered point-level geometric features with the node-level semantic feature via our designed feature fusion module. Partial matching is enabled by using a learnable method to select the top-k similar node pairs. Subsequent downstream tasks such as point cloud registration are achieved by running a pre-trained registration network within the matched regions.We further propose a point-matching rescoring method, that uses the node-wise alignment of the 3D scene graph to reweight the matching candidates from a pre-trained point cloud registration method. It reduces the false point correspondences estimated especially in low-overlapping cases.Experiments show that our method improves the alignment accuracy by 10$\sim$20\% in low-overlap and random transformation scenarios and outperforms the existing work in multiple downstream tasks. Our code and models are available here (https://github.com/dfki-av/sg-pgm.git).
Chat is not available.
Successful Page Load