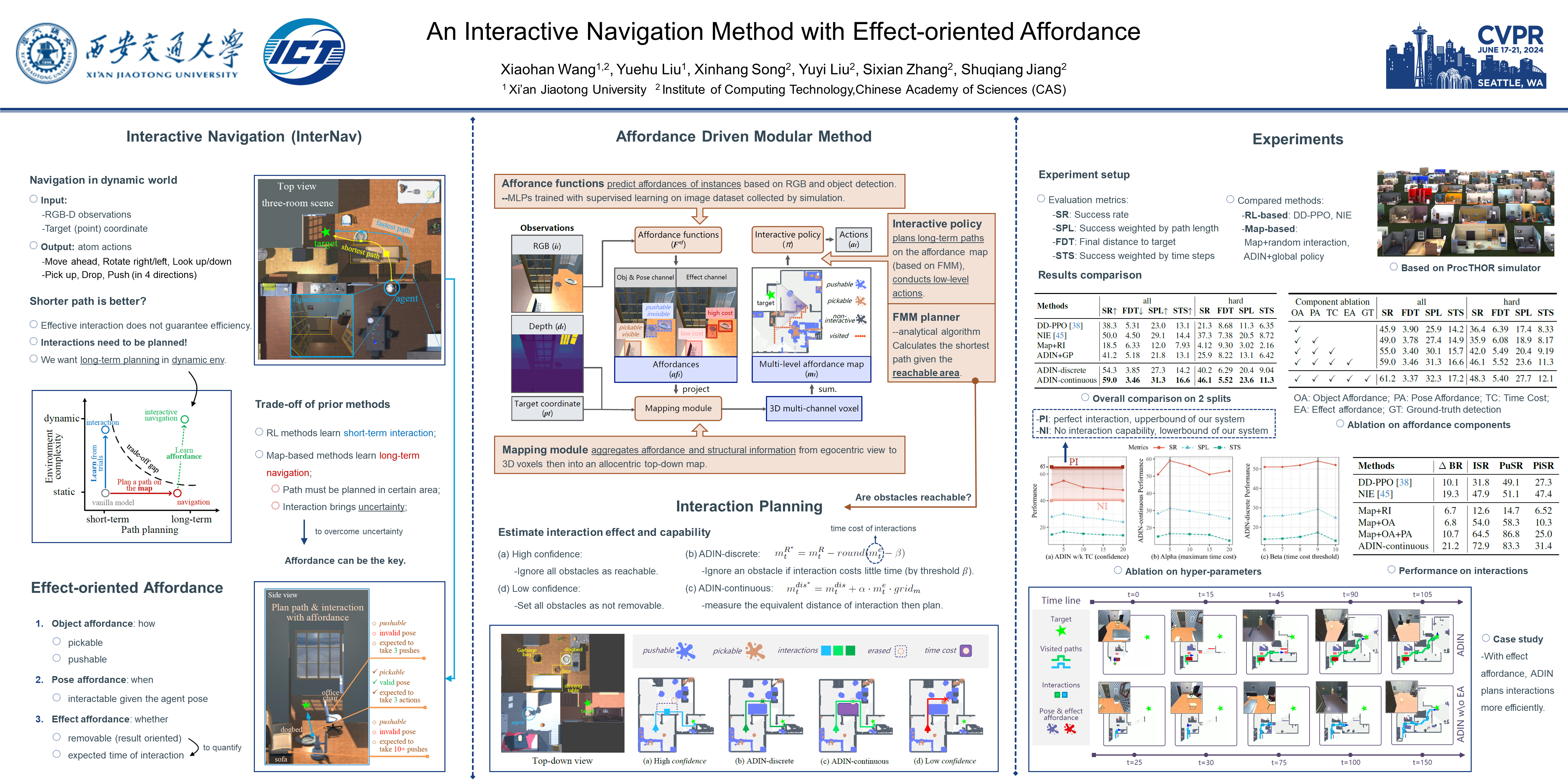
An Interactive Navigation Method with Effect-oriented Affordance
{kind=link}
Abstract
Visual navigation is to let the agent reach the target according to the continuous visual input. In most previous works, visual navigation is usually assumed to be done in a static and ideal environment: the target is always reachable with no need to alter the environment. However, the “messy” environments are more general and practical in our daily lives, where the agent may get blocked by obstacles. Thus Interactive Navigation (InterNav) is introduced to navigate to the objects in more realistic "messy" environments according to the object interaction. Prior work on InterNav learns short-term interaction through extensive trials with reinforcement learning. However, interaction does not guarantee efficient navigation, that is, planning obstacle interactions that make shorter paths and consume less effort is also crucial. In this paper, we introduce an effect-oriented affordance map to enable long-term interactive navigation, extending the existing map-based navigation framework to the domain of dynamic environment. We train a set of affordance functions predicting available interactions and the time cost of removing obstacles, which informatively support an interactive modular system to address interaction and long-term planning. Experiments on the ProcTHOR simulator demonstrate the capability of our affordance-driven system in long-term navigation in complex dynamic environments.