Improving Semantic Correspondence with Viewpoint-Guided Spherical Maps
{kind=link}
Abstract
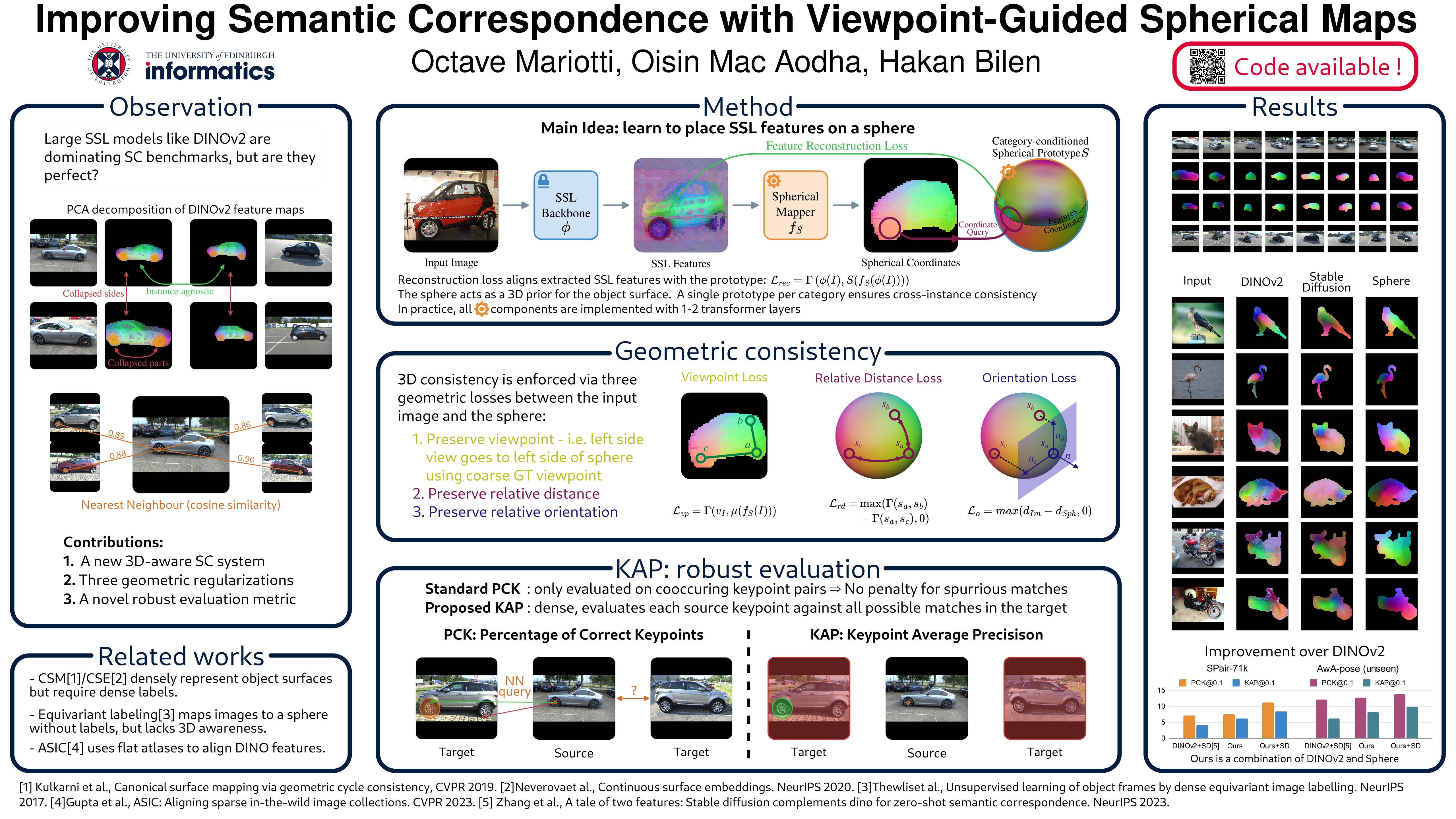
Recent progress in self-supervised representation learning has resulted in models that are capable of extracting image features that are not only effective at encoding image-level, but also pixel-level, semantics. These features have been shown to be effective for dense visual semantic correspondence estimation, even outperforming fully-supervised methods. Nevertheless, current self-supervised approaches still fail in the presence of challenging image characteristics such as symmetries and repeated parts. To address these limitations, we propose a new approach for semantic correspondence estimation that supplements discriminative self-supervised features with 3D understanding via a weak geometric spherical prior. Compared to more involved 3D pipelines, our model only requires weak viewpoint information, and the simplicity of our spherical representation enables us to inject informative geometric priors into the model during training. We propose a new evaluation metric that better accounts for repeated part and symmetry-induced mistakes. We present results on the challenging SPair-71k dataset, where we show that our approach demonstrates is capable of distinguishing between symmetric views and repeated parts across many object categories, and also demonstrate that we can generalize to unseen classes on the AwA dataset.