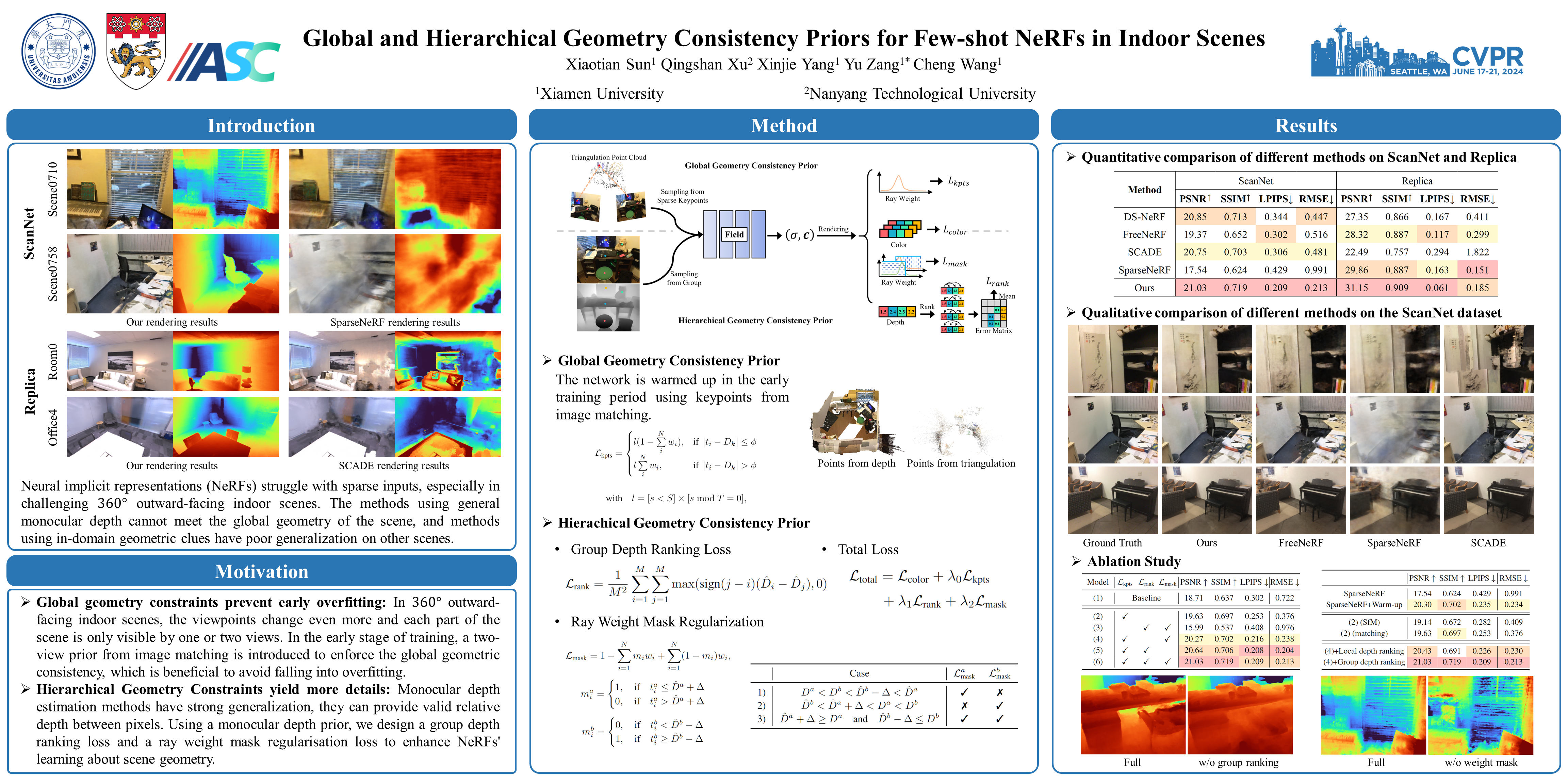
Global and Hierarchical Geometry Consistency Priors for Few-shot NeRFs in Indoor Scenes
Xiaotian Sun ⋅ Qingshan Xu ⋅ Xinjie Yang ⋅ Yu Zang ⋅ Cheng Wang
2024 Poster
{kind=link}
Abstract
It is challenging for Neural Radiance Fields (NeRFs) in the few-shot setting to reconstruct high-quality novel views and depth maps in $360^\circ$ outward-facing indoor scenes. The captured sparse views for these scenes usually contain large viewpoint variations. This greatly reduces the potential consistency between views, leading NeRFs to degrade a lot in these scenarios. Existing methods usually leverage pretrained depth prediction models to improve NeRFs. However, these methods cannot guarantee geometry consistency due to the inherent geometry ambiguity in the pretrained models, thus limiting NeRFs' performance. In this work, we present P\textsuperscript{2}NeRF to capture global and hierarchical geometry consistency priors from pretrained models, thus facilitating few-shot NeRFs in $360^\circ$ outward-facing indoor scenes. On the one hand, we propose a matching-based geometry warm-up strategy to provide global geometry consistency priors for NeRFs. This effectively avoids the overfitting of early training with sparse inputs. On the other hand, we propose a group depth ranking loss and ray weight mask regularization based on the monocular depth estimation model. This provides hierarchical geometry consistency priors for NeRFs. As a result, our approach can fully leverage the geometry consistency priors from pretrained models and help few-shot NeRFs achieve state-of-the-art performance on two challenging indoor datasets. Our code is released at https://github.com/XT5un/P2NeRF.
Chat is not available.
Successful Page Load