SocialCircle: Learning the Angle-based Social Interaction Representation for Pedestrian Trajectory Prediction
{kind=link}
Abstract
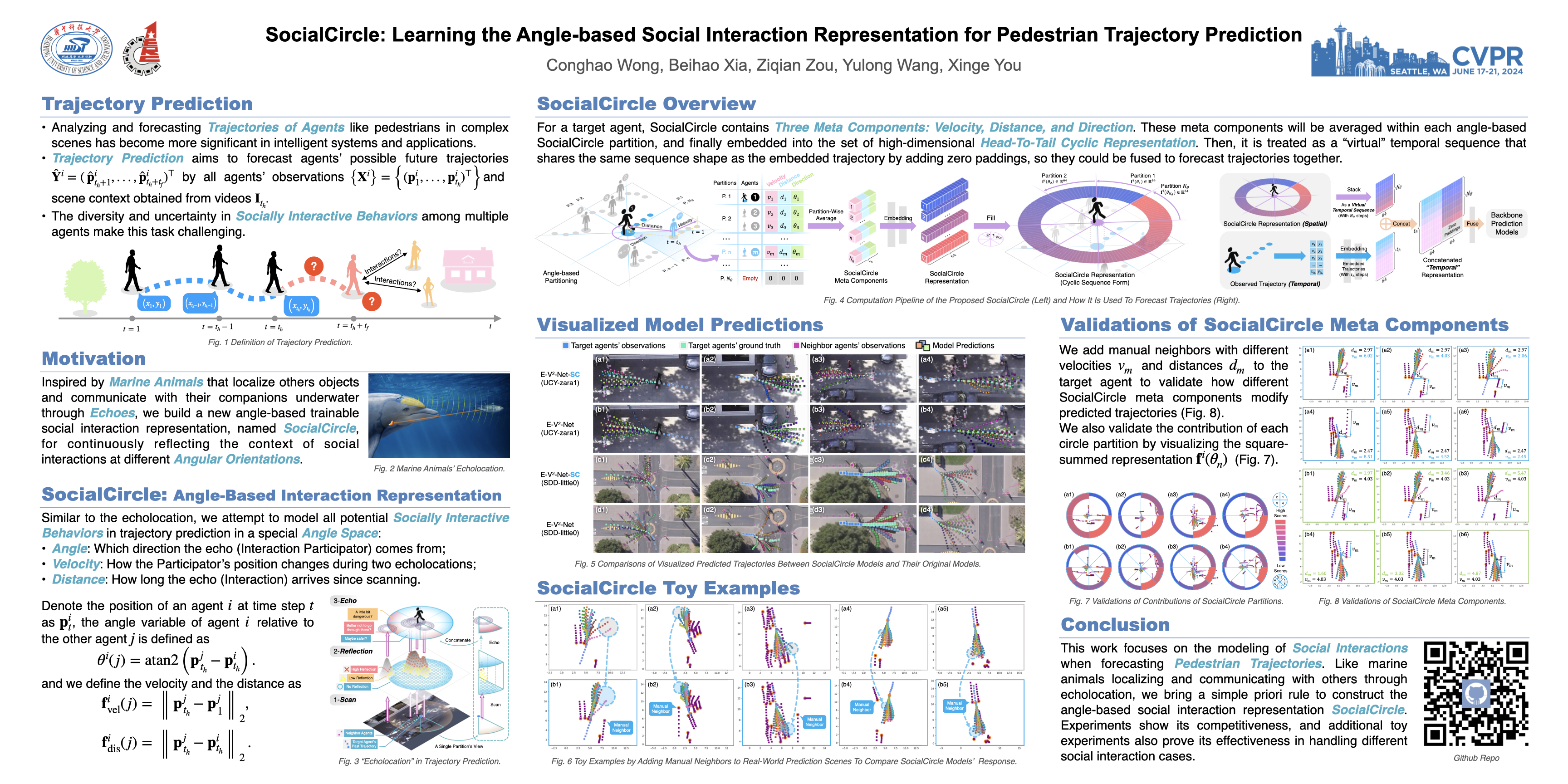
Analyzing and forecasting trajectories of agents like pedestrians and cars in complex scenes has become more and more significant in many intelligent systems and applications. The diversity and uncertainty in socially interactive behaviors among a rich variety of agents make this task more challenging than other deterministic computer vision tasks. Researchers have made a lot of efforts to quantify the effects of these interactions on future trajectories through different mathematical models and network structures, but this problem has not been well solved. Inspired by marine animals that localize the positions of their companions underwater through echoes, we build a new anglebased trainable social interaction representation, named SocialCircle, for continuously reflecting the context of social interactions at different angular orientations relative to the target agent. We validate the effect of the proposed SocialCircle by training it along with several newly released trajectory prediction models, and experiments show that the SocialCircle not only quantitatively improves the prediction performance, but also qualitatively helps better simulate social interactions when forecasting pedestrian trajectories in a way that is consistent with human intuitions.