Noisy One-point Homographies are Surprisingly Good
{kind=link}
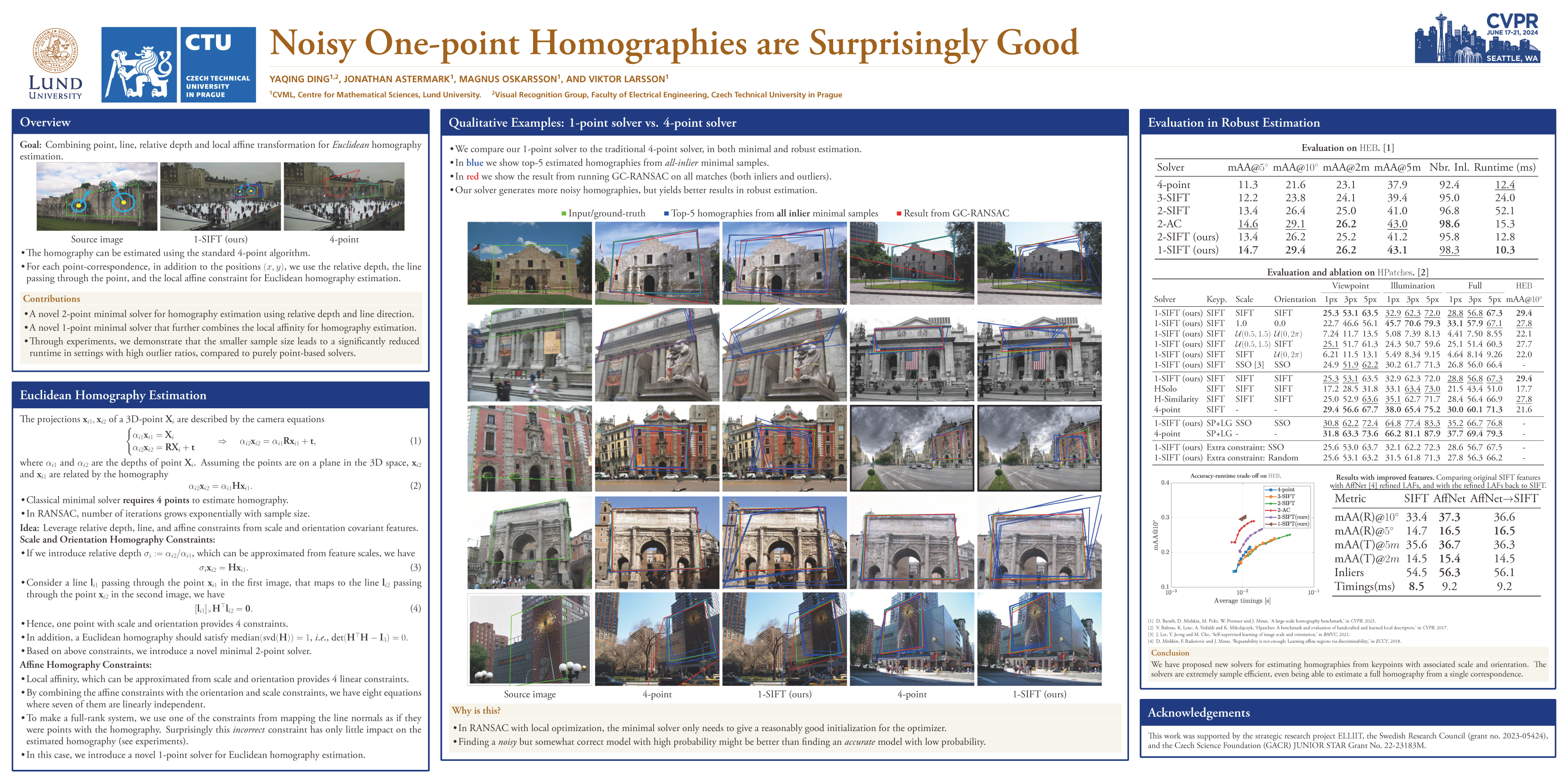
Abstract
Two-view homography estimation is a classic and fundamental problem in computer vision.While conceptually simple, the problem quickly becomes challenging when multiple planes are visible in the image pair.Even with correct matches, each individual plane (homography) might have a very low number of inliers when comparing to the set of all correspondences.In practice, this requires a large number of RANSAC iterations to generate a good model hypothesis.The current state-of-the-art methods therefore seek to reduce the sample size, from four point correspondences originally, by including additional information such as keypoint orientation/angles or local affine information.In this work, we continue in this direction and propose a novel one-point solver that leverages different approximate constraints derived from the same auxiliary information.In experiments we obtain state-of-the-art results, with execution time speed-ups, on large benchmark datasets and show that it is more beneficial for the solver to be sample efficient compared to generating more accurate homographies.