Towards Robust 3D Object Detection with LiDAR and 4D Radar Fusion in Various Weather Conditions
{kind=link}
Abstract
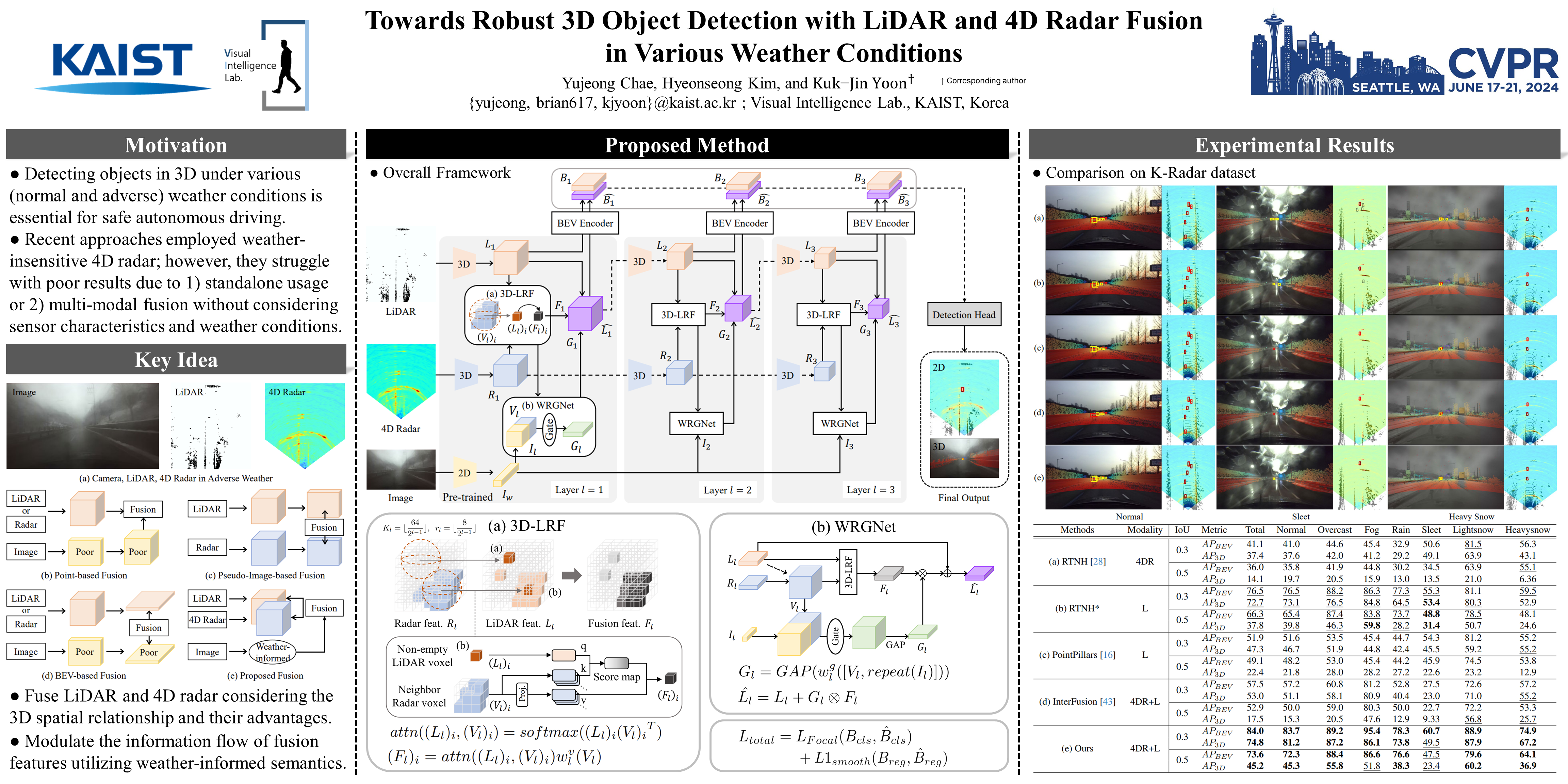
Detecting objects in 3D under various (normal and adverse) weather conditions is essential for safe autonomous driving systems. Recent approaches have focused on employing weather-insensitive 4D radar sensors and leveraging them with other modalities, such as LiDAR. However, they fuse multi-modal information without considering the sensor characteristics and weather conditions, and lose some height information which could be useful for localizing 3D objects. In this paper, we propose a novel framework for robust LiDAR and 4D radar-based 3D object detection. Specifically, we propose a 3D-LRF module that considers the distinct patterns they exhibit in 3D space (e.g., precise 3D mapping of LiDAR and wide-range, weather-insensitive measurement of 4D radar) and extract fusion features based on their 3D spatial relationship. Then, our weather-conditional radar-flow gating network modulates the information flow of fusion features depending on weather conditions, and obtains enhanced feature that effectively incorporates the strength of two domains under various weather conditions. The extensive experiments demonstrate that our model achieves SoTA performance for 3D object detection under various weather conditions.