RTMO: Towards High-Performance One-Stage Real-Time Multi-Person Pose Estimation
{kind=link}
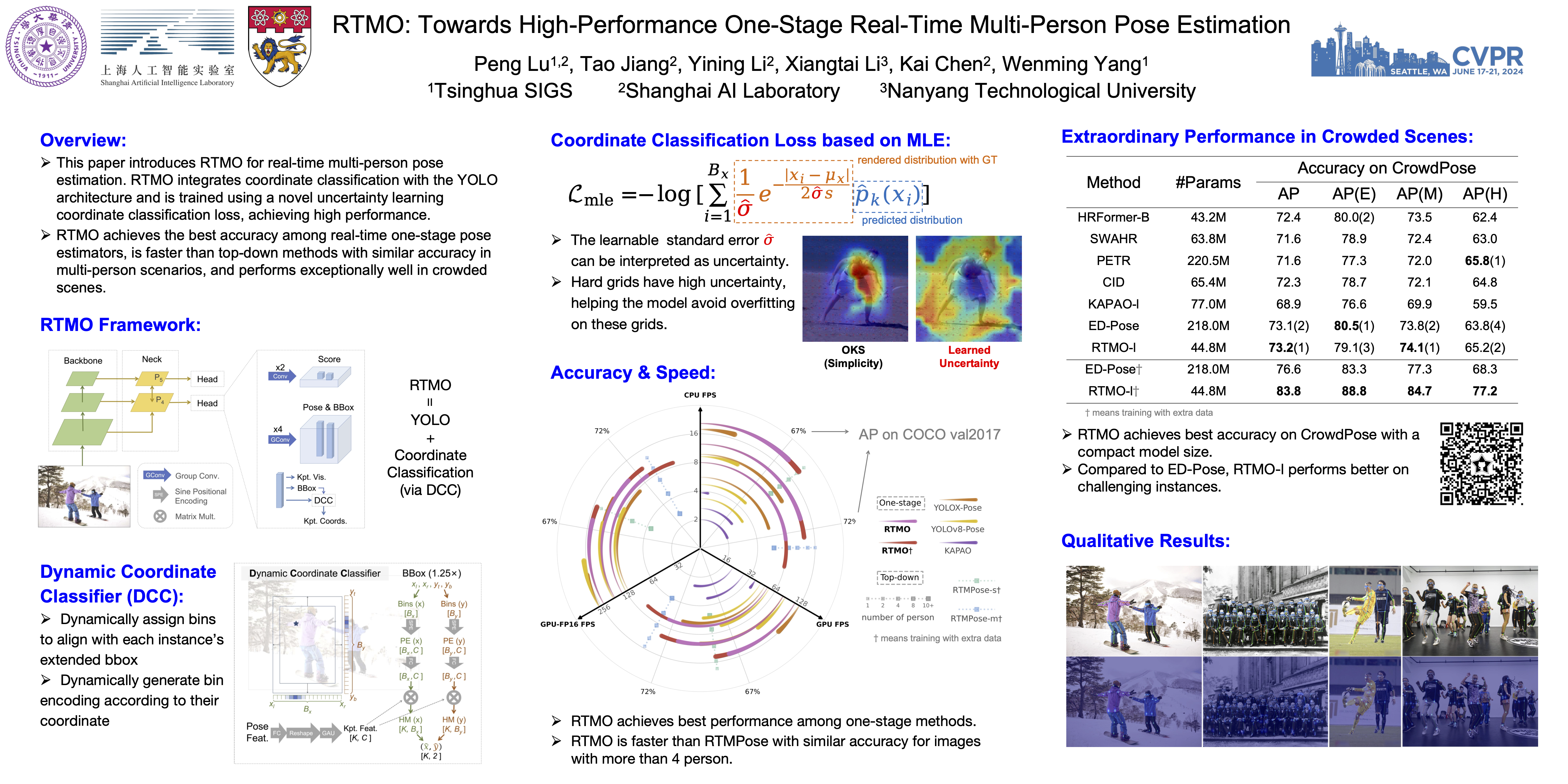
Abstract
Real-time multi-person pose estimation presents significant challenges in balancing speed and precision. While two-stage top-down methods slow down as the number of people in the image increases, existing one-stage methods often fail to simultaneously deliver high accuracy and real-time performance. This paper introduces RTMO, a one-stage pose estimation framework that seamlessly integrates coordinate classification by representing keypoints using dual 1-D heatmaps within the YOLO architecture, achieving accuracy comparable to top-down methods while maintaining high speed. We propose a dynamic coordinate classifier and a tailored loss function for heatmap learning, specifically designed to address the incompatibilities between coordinate classification and dense prediction models. RTMO outperforms state-of-the-art one-stage pose estimators, achieving 1.1% higher AP on COCO while operating about 9 times faster with the same backbone. Our largest model, RTMO-l, attains 74.8% AP on COCO val2017 and 141 FPS on a single V100 GPU, demonstrating its efficiency and accuracy. The code and models are available at https://github.com/open-mmlab/mmpose/tree/main/projects/rtmo.