High-Frequency Stereo Matching Network
 Highlight
Highlight
{kind=link}
Abstract
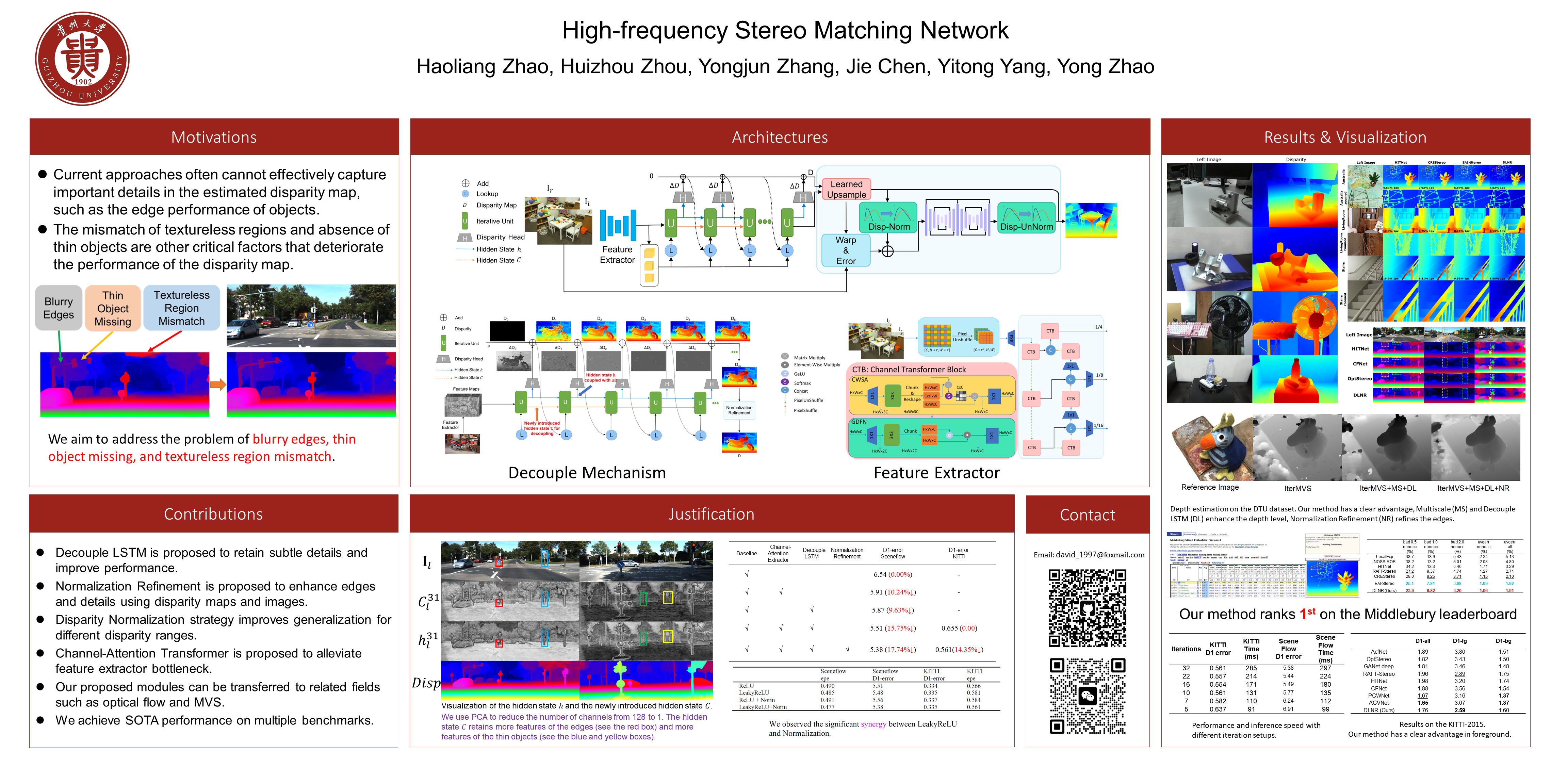
In the field of binocular stereo matching, remarkable progress has been made by iterative methods like RAFT-Stereo and CREStereo. However, most of these methods lose information during the iterative process, making it difficult to generate more detailed difference maps that take full advantage of high-frequency information. We propose the Decouple module to alleviate the problem of data coupling and allow features containing subtle details to transfer across the iterations which proves to alleviate the problem significantly in the ablations. To further capture high-frequency details, we propose a Normalization Refinement module that unifies the disparities as a proportion of the disparities over the width of the image, which address the problem of module failure in cross-domain scenarios. Further, with the above improvements, the ResNet-like feature extractor that has not been changed for years becomes a bottleneck. Towards this end, we proposed a multi-scale and multi-stage feature extractor that introduces the channel-wise self-attention mechanism which greatly addresses this bottleneck. Our method (DLNR) ranks 1st on the Middlebury leaderboard, significantly outperforming the next best method by 13.04%. Our method also achieves SOTA performance on the KITTI-2015 benchmark for D1-fg.