Normalizing Flow Based Feature Synthesis for Outlier-Aware Object Detection
 Highlight
Highlight
{kind=link}
Abstract
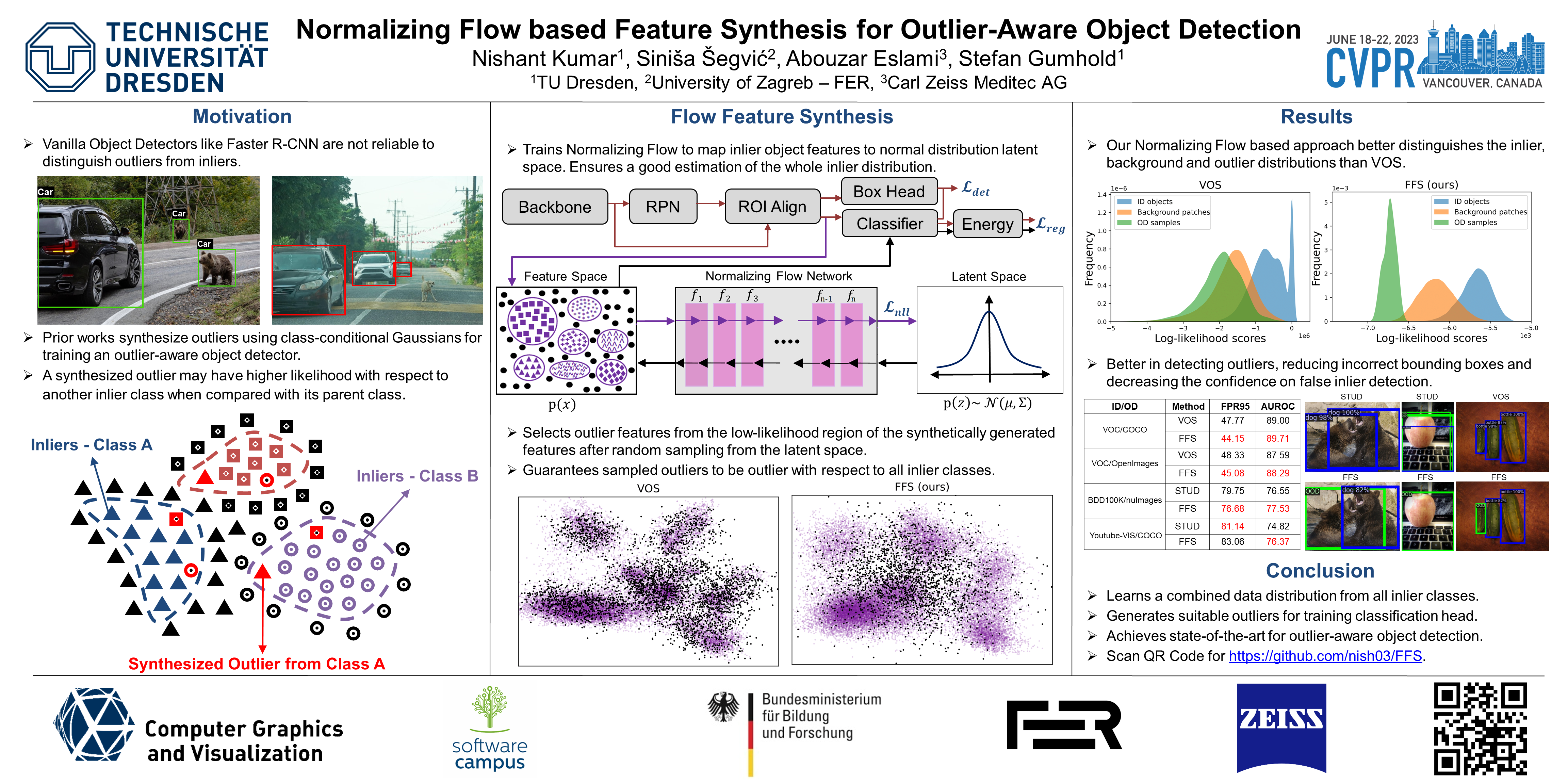
Real-world deployment of reliable object detectors is crucial for applications such as autonomous driving. However, general-purpose object detectors like Faster R-CNN are prone to providing overconfident predictions for outlier objects. Recent outlier-aware object detection approaches estimate the density of instance-wide features with class-conditional Gaussians and train on synthesized outlier features from their low-likelihood regions. However, this strategy does not guarantee that the synthesized outlier features will have a low likelihood according to the other class-conditional Gaussians. We propose a novel outlier-aware object detection framework that distinguishes outliers from inlier objects by learning the joint data distribution of all inlier classes with an invertible normalizing flow. The appropriate sampling of the flow model ensures that the synthesized outliers have a lower likelihood than inliers of all object classes, thereby modeling a better decision boundary between inlier and outlier objects. Our approach significantly outperforms the state-of-the-art for outlier-aware object detection on both image and video datasets.