BAAM: Monocular 3D Pose and Shape Reconstruction With Bi-Contextual Attention Module and Attention-Guided Modeling
{kind=link}
Abstract
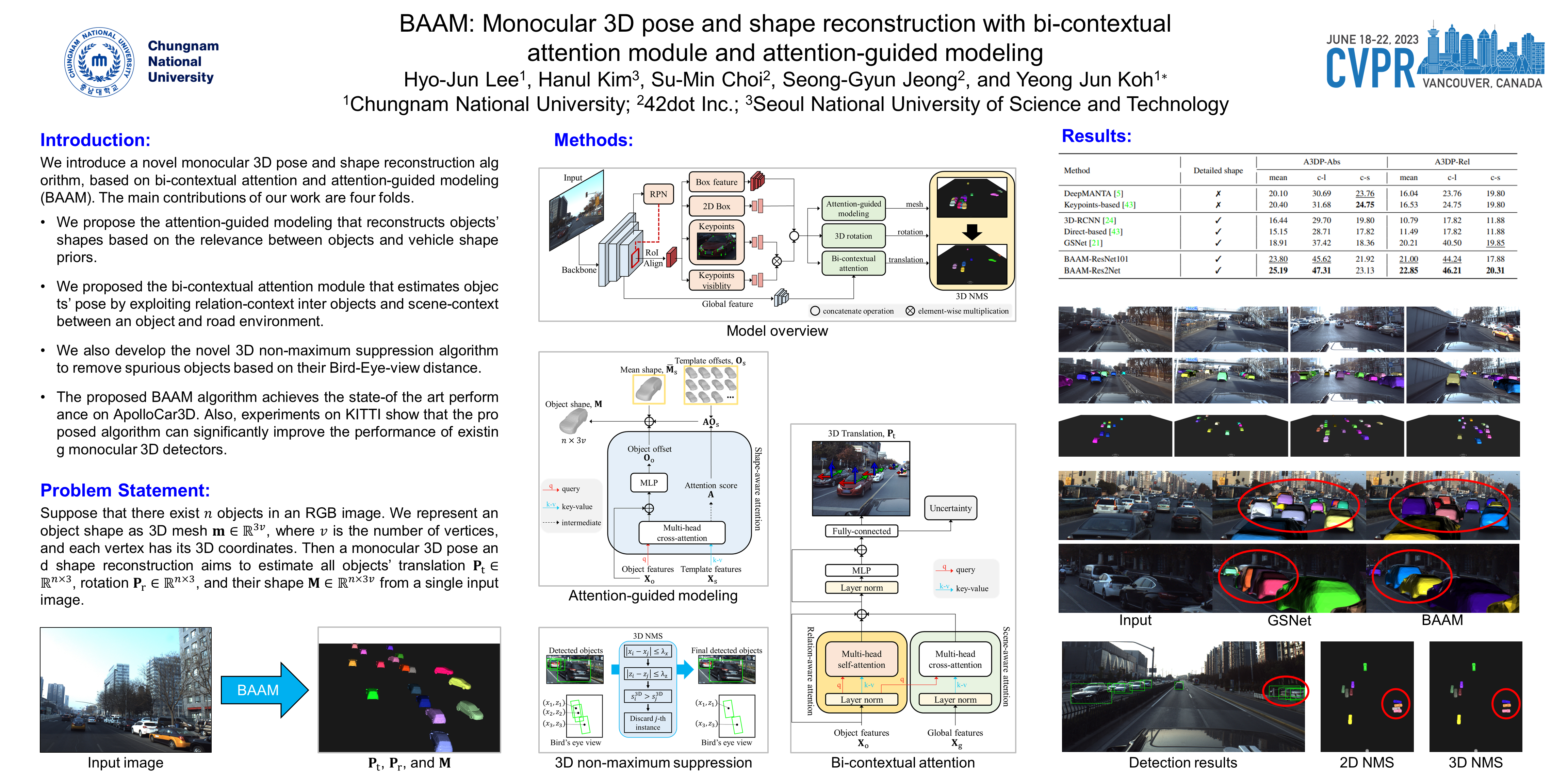
3D traffic scene comprises various 3D information about car objects, including their pose and shape. However, most recent studies pay relatively less attention to reconstructing detailed shapes. Furthermore, most of them treat each 3D object as an independent one, resulting in losses of relative context inter-objects and scene context reflecting road circumstances. A novel monocular 3D pose and shape reconstruction algorithm, based on bi-contextual attention and attention-guided modeling (BAAM), is proposed in this work. First, given 2D primitives, we reconstruct 3D object shape based on attention-guided modeling that considers the relevance between detected objects and vehicle shape priors. Next, we estimate 3D object pose through bi-contextual attention, which leverages relation-context inter objects and scene-context between an object and road environment. Finally, we propose a 3D non maximum suppression algorithm to eliminate spurious objects based on their Bird-Eye-View distance. Extensive experiments demonstrate that the proposed BAAM yields state-of-the-art performance on ApolloCar3D. Also, they show that the proposed BAAM can be plugged into any mature monocular 3D object detector on KITTI and significantly boost their performance.