ProphNet: Efficient Agent-Centric Motion Forecasting With Anchor-Informed Proposals
 Highlight
Highlight
{kind=link}
Abstract
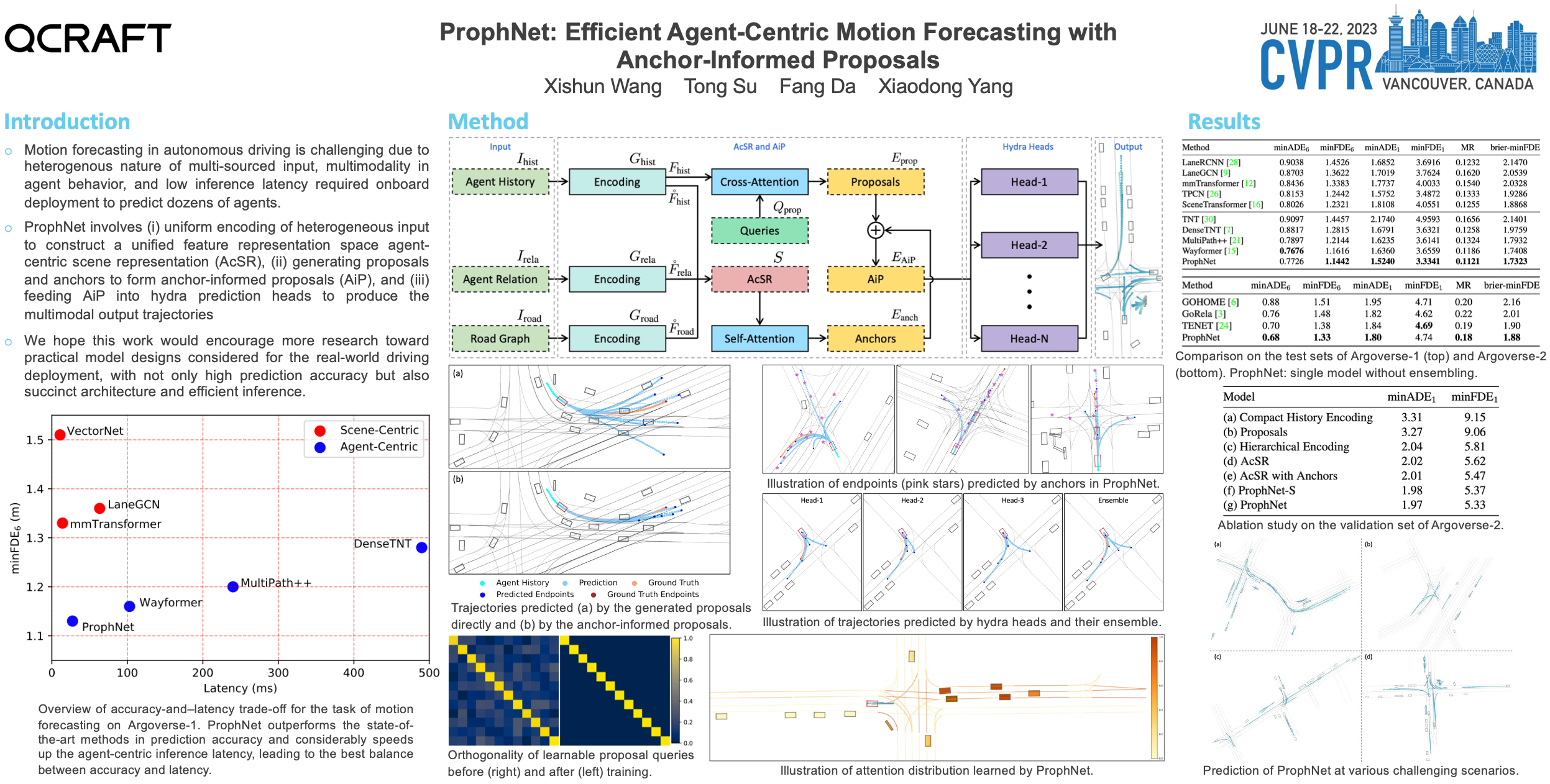
Motion forecasting is a key module in an autonomous driving system. Due to the heterogeneous nature of multi-sourced input, multimodality in agent behavior, and low latency required by onboard deployment, this task is notoriously challenging. To cope with these difficulties, this paper proposes a novel agent-centric model with anchor-informed proposals for efficient multimodal motion forecasting. We design a modality-agnostic strategy to concisely encode the complex input in a unified manner. We generate diverse proposals, fused with anchors bearing goal-oriented context, to induce multimodal prediction that covers a wide range of future trajectories. The network architecture is highly uniform and succinct, leading to an efficient model amenable for real-world deployment. Experiments reveal that our agent-centric network compares favorably with the state-of-the-art methods in prediction accuracy, while achieving scene-centric level inference latency.