Implicit Surface Contrastive Clustering for LiDAR Point Clouds
{kind=link}
Abstract
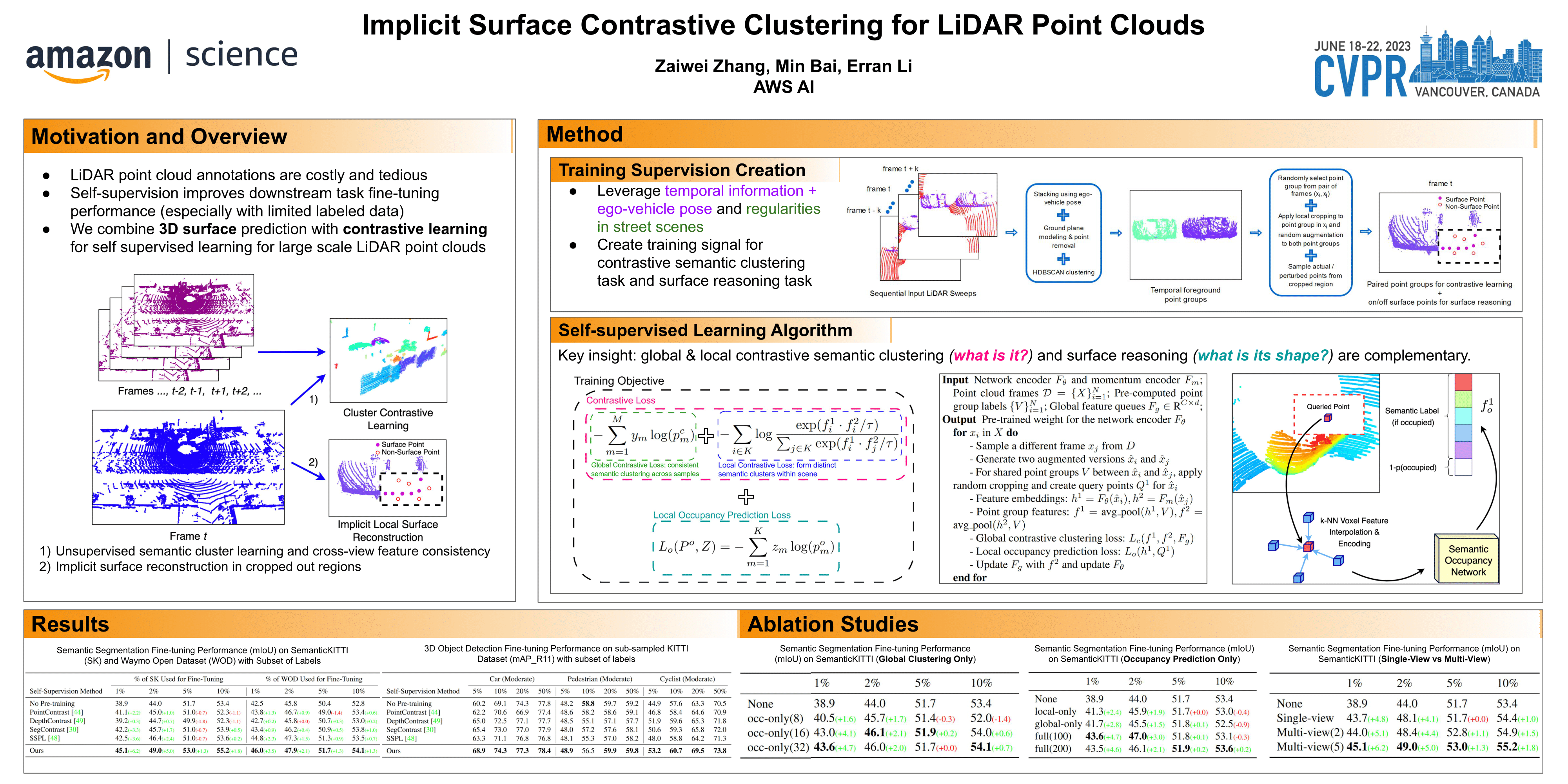
Self-supervised pretraining on large unlabeled datasets has shown tremendous success on improving the task performance of many computer vision tasks. However, such techniques have not been widely used for outdoor LiDAR point cloud perception due to its scene complexity and wide range. This prevents impactful application from 2D pretraining frameworks. In this paper, we propose ISCC, a new self-supervised pretraining method, core of which are two pretext tasks newly designed for LiDAR point clouds. The first task focuses on learning semantic information by sorting local groups of points in the scene into a globally consistent set of semantically meaningful clusters using contrastive learning. This is augmented with a second task which reasons about precise surfaces of various parts of the scene through implicit surface reconstruction to learn geometric structures. We demonstrate their effectiveness on transfer learning performance on 3D object detection and semantic segmentation in real world LiDAR scenes. We further design an unsupervised semantic grouping task to showcase the highly semantically meaningful features learned by our approach.