vMAP: Vectorised Object Mapping for Neural Field SLAM
Xin Kong ⋅ Shikun Liu ⋅ Marwan Taher ⋅ Andrew J. Davison
2023 Poster
{kind=link}
Abstract
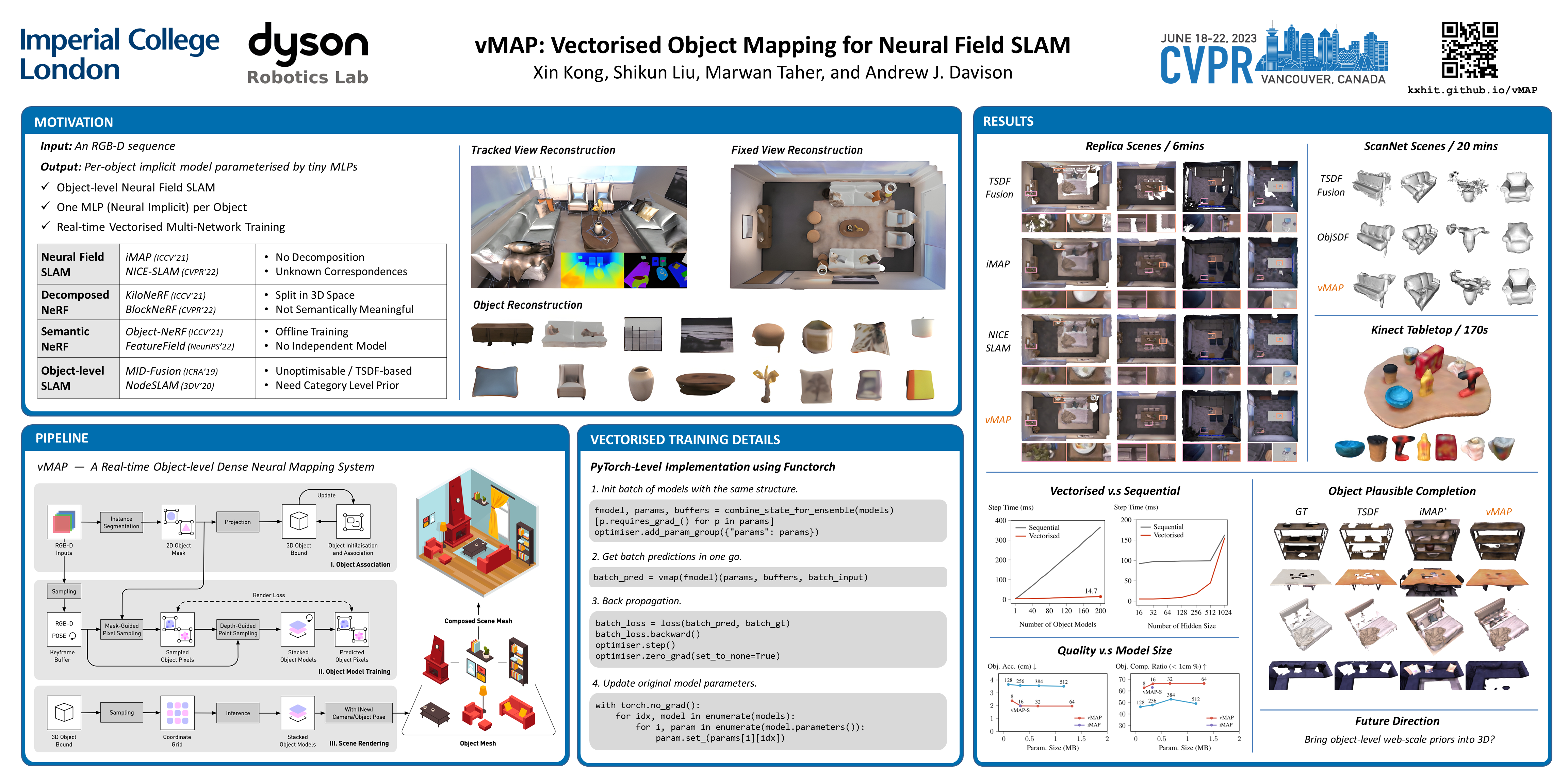
We present vMAP, an object-level dense SLAM system using neural field representations. Each object is represented by a small MLP, enabling efficient, watertight object modelling without the need for 3D priors. As an RGB-D camera browses a scene with no prior information, vMAP detects object instances on-the-fly, and dynamically adds them to its map. Specifically, thanks to the power of vectorised training, vMAP can optimise as many as 50 individual objects in a single scene, with an extremely efficient training speed of 5Hz map update. We experimentally demonstrate significantly improved scene-level and object-level reconstruction quality compared to prior neural field SLAM systems. Project page: https://kxhit.github.io/vMAP.
Chat is not available.
Successful Page Load