Matching Is Not Enough: A Two-Stage Framework for Category-Agnostic Pose Estimation
 Highlight
Highlight
{kind=link}
Abstract
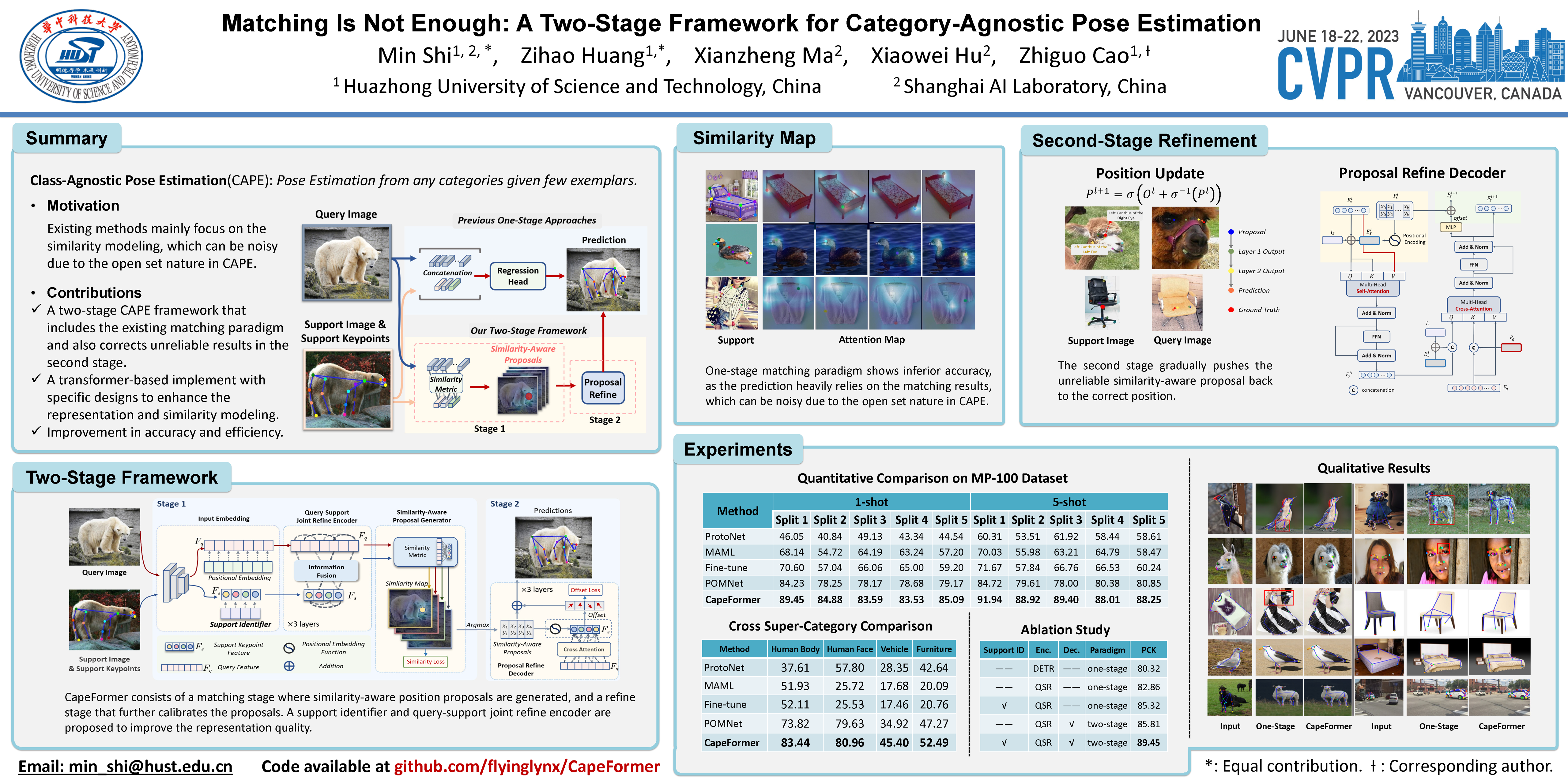
Category-agnostic pose estimation (CAPE) aims to predict keypoints for arbitrary categories given support images with keypoint annotations. Existing approaches match the keypoints across the image for localization. However, such a one-stage matching paradigm shows inferior accuracy: the prediction heavily relies on the matching results, which can be noisy due to the open set nature in CAPE. For example, two mirror-symmetric keypoints (e.g., left and right eyes) in the query image can both trigger high similarity on certain support keypoints (eyes), which leads to duplicated or opposite predictions. To calibrate the inaccurate matching results, we introduce a two-stage framework, where matched keypoints from the first stage are viewed as similarity-aware position proposals. Then, the model learns to fetch relevant features to correct the initial proposals in the second stage. We instantiate the framework with a transformer model tailored for CAPE. The transformer encoder incorporates specific designs to improve the representation and similarity modeling in the first matching stage. In the second stage, similarity-aware proposals are packed as queries in the decoder for refinement via cross-attention. Our method surpasses the previous best approach by large margins on CAPE benchmark MP-100 on both accuracy and efficiency. Code available at https://github.com/flyinglynx/CapeFormer