Learning To Fuse Monocular and Multi-View Cues for Multi-Frame Depth Estimation in Dynamic Scenes
{kind=link}
Abstract
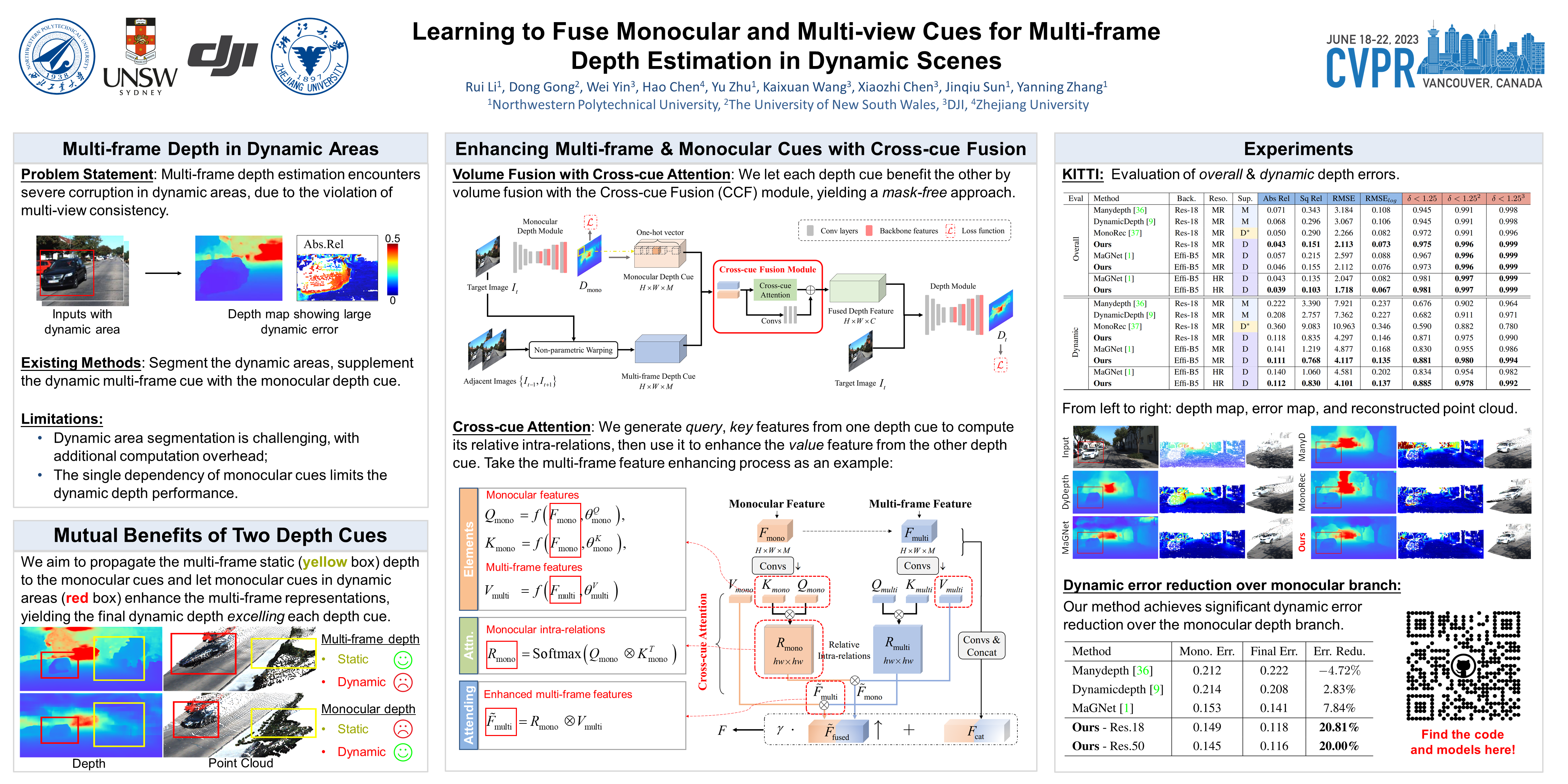
Multi-frame depth estimation generally achieves high accuracy relying on the multi-view geometric consistency. When applied in dynamic scenes, e.g., autonomous driving, this consistency is usually violated in the dynamic areas, leading to corrupted estimations. Many multi-frame methods handle dynamic areas by identifying them with explicit masks and compensating the multi-view cues with monocular cues represented as local monocular depth or features. The improvements are limited due to the uncontrolled quality of the masks and the underutilized benefits of the fusion of the two types of cues. In this paper, we propose a novel method to learn to fuse the multi-view and monocular cues encoded as volumes without needing the heuristically crafted masks. As unveiled in our analyses, the multi-view cues capture more accurate geometric information in static areas, and the monocular cues capture more useful contexts in dynamic areas. To let the geometric perception learned from multi-view cues in static areas propagate to the monocular representation in dynamic areas and let monocular cues enhance the representation of multi-view cost volume, we propose a cross-cue fusion (CCF) module, which includes the cross-cue attention (CCA) to encode the spatially non-local relative intra-relations from each source to enhance the representation of the other. Experiments on real-world datasets prove the significant effectiveness and generalization ability of the proposed method.