Neural Map Prior for Autonomous Driving
{kind=link}
Abstract
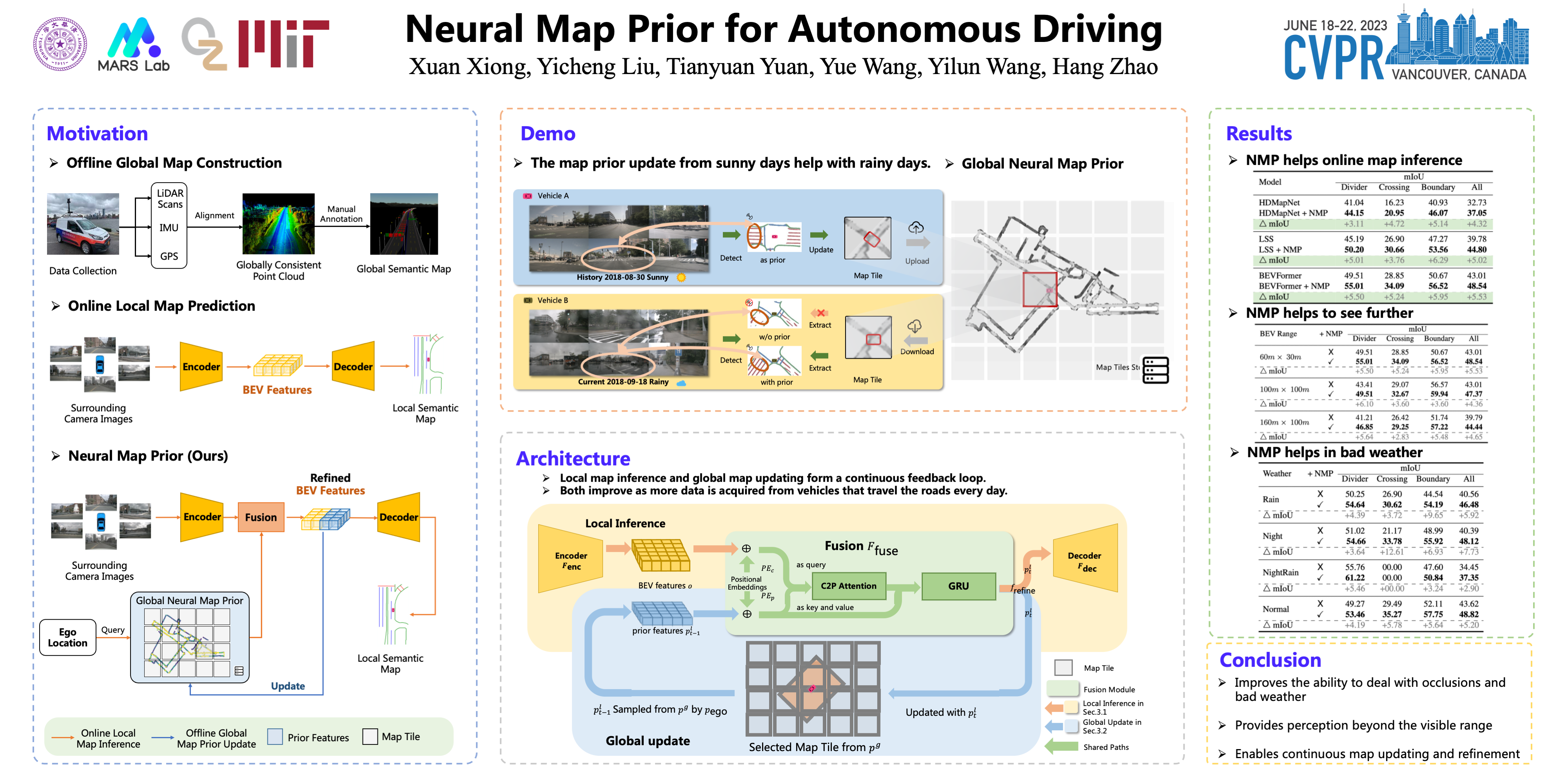
High-definition (HD) semantic maps are a crucial component for autonomous driving on urban streets. Traditional offline HD maps are created through labor-intensive manual annotation processes, which are costly and do not accommodate timely updates. Recently, researchers have proposed to infer local maps based on online sensor observations. However, the range of online map inference is constrained by sensor perception range and is easily affected by occlusions. In this work, we propose Neural Map Prior (NMP), a neural representation of global maps that enables automatic global map updates and enhances local map inference performance. To incorporate the strong map prior into local map inference, we leverage cross-attention to dynamically capture the correlations between current features and prior features. For updating the global neural map prior, we use a learning-based fusion module to guide the network in fusing features from previous traversals. This design allows the network to capture a global neural map prior while making sequential online map predictions. Experimental results on the nuScenes dataset demonstrate that our framework is compatible with most map segmentation/detection methods, improving map prediction performance in challenging weather conditions and over an extended horizon. To the best of our knowledge, this represents the first learning-based system for constructing a global map prior.