BEV-LaneDet: An Efficient 3D Lane Detection Based on Virtual Camera via Key-Points
{kind=link}
Abstract
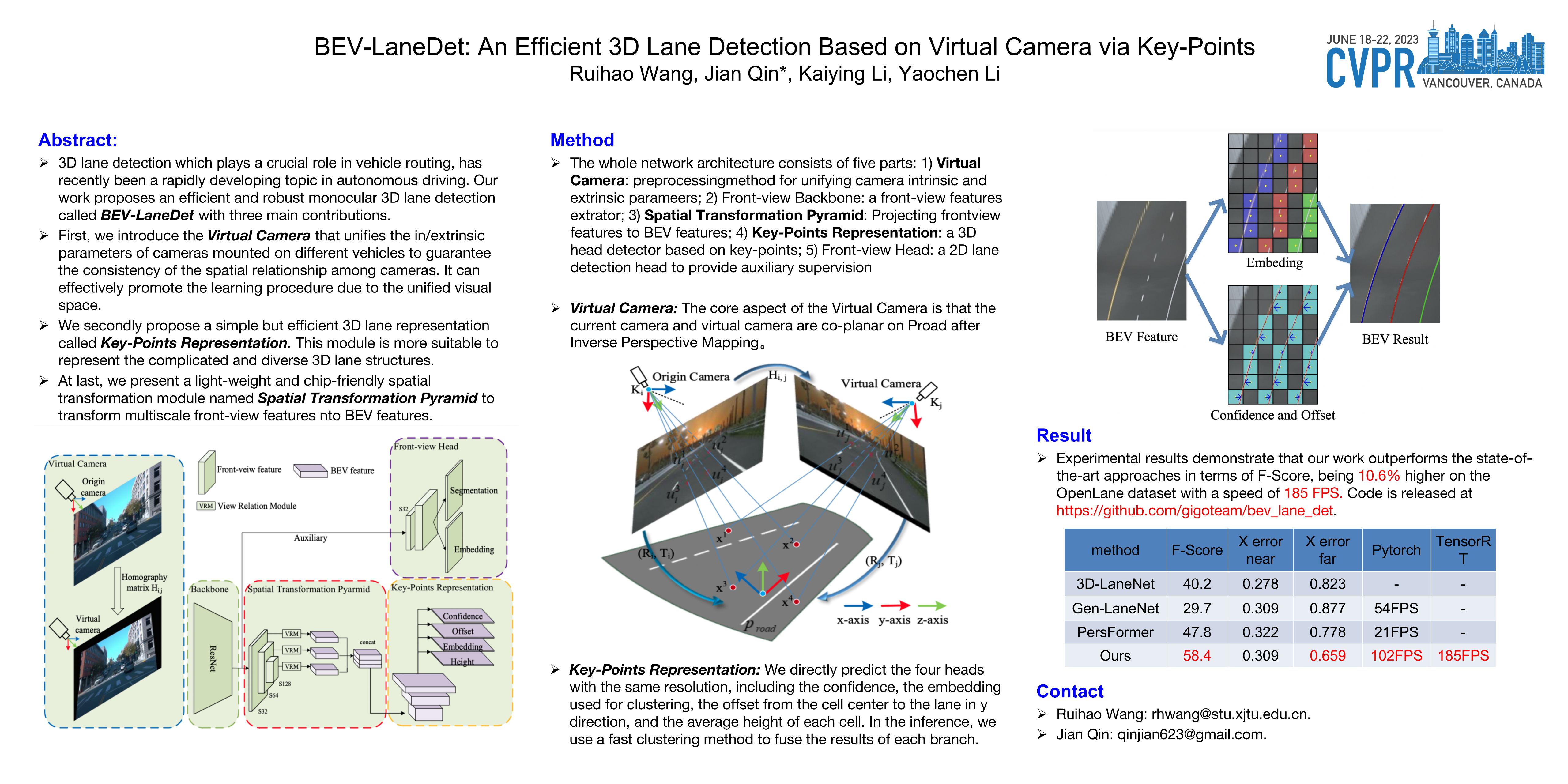
3D lane detection which plays a crucial role in vehicle routing, has recently been a rapidly developing topic in autonomous driving. Previous works struggle with practicality due to their complicated spatial transformations and inflexible representations of 3D lanes. Faced with the issues, our work proposes an efficient and robust monocular 3D lane detection called BEV-LaneDet with three main contributions. First, we introduce the Virtual Camera that unifies the in/extrinsic parameters of cameras mounted on different vehicles to guarantee the consistency of the spatial relationship among cameras. It can effectively promote the learning procedure due to the unified visual space. We secondly propose a simple but efficient 3D lane representation called Key-Points Representation. This module is more suitable to represent the complicated and diverse 3D lane structures. At last, we present a light-weight and chip-friendly spatial transformation module named Spatial Transformation Pyramid to transform multiscale front-view features into BEV features. Experimental results demonstrate that our work outperforms the state-of-the-art approaches in terms of F-Score, being 10.6% higher on the OpenLane dataset and 4.0% higher on the Apollo 3D synthetic dataset, with a speed of 185 FPS. Code is released at https://github.com/gigo-team/bevlanedet.