Towards Stable Human Pose Estimation via Cross-View Fusion and Foot Stabilization
{kind=link}
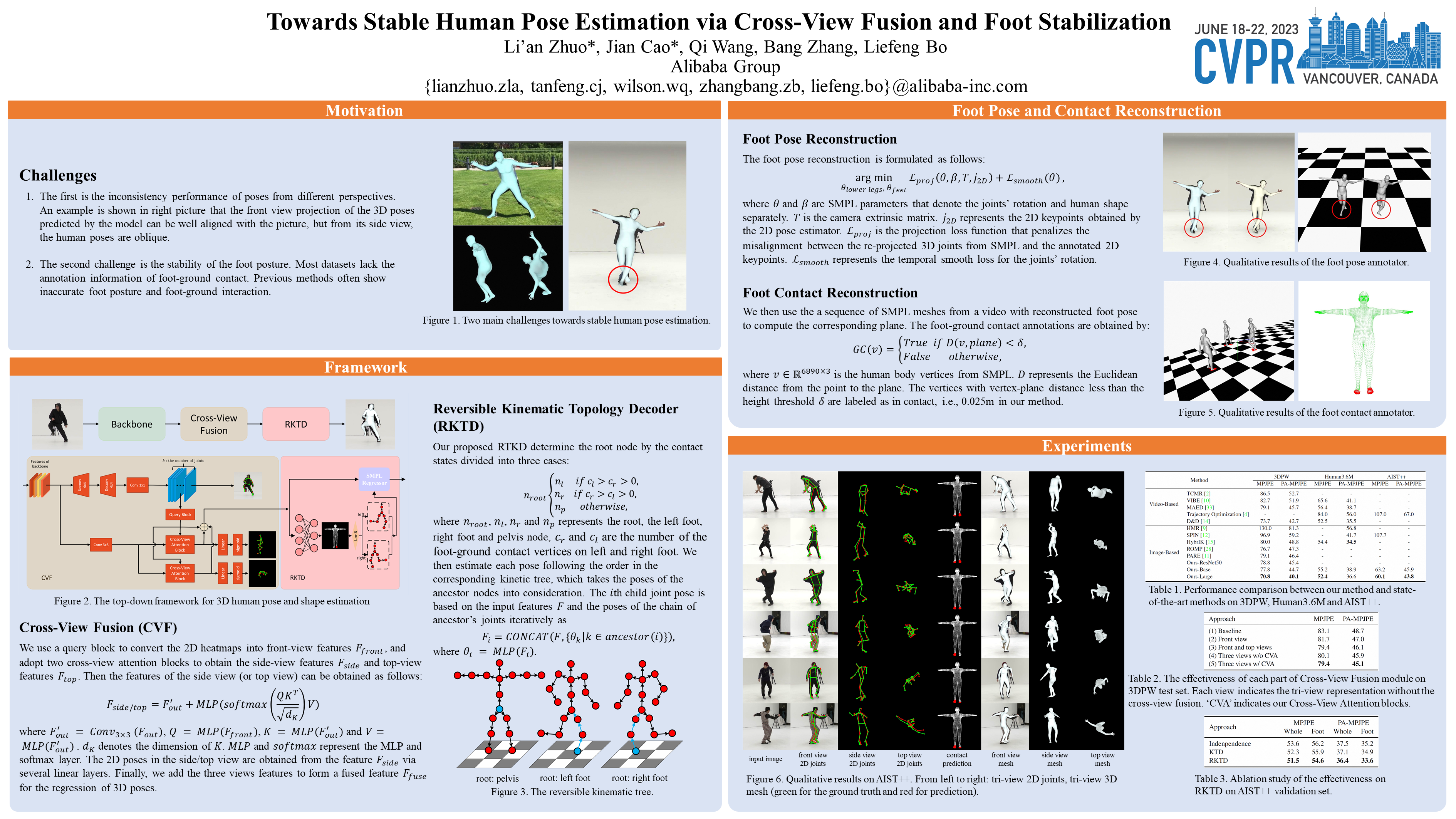
Abstract
Towards stable human pose estimation from monocular images, there remain two main dilemmas. On the one hand, the different perspectives, i.e., front view, side view, and top view, appear the inconsistent performances due to the depth ambiguity. On the other hand, foot posture plays a significant role in complicated human pose estimation, i.e., dance and sports, and foot-ground interaction, but unfortunately, it is omitted in most general approaches and datasets. In this paper, we first propose the Cross-View Fusion (CVF) module to catch up with better 3D intermediate representation and alleviate the view inconsistency based on the vision transformer encoder. Then the optimization-based method is introduced to reconstruct the foot pose and foot-ground contact for the general multi-view datasets including AIST++ and Human3.6M. Besides, the reversible kinematic topology strategy is innovated to utilize the contact information into the full-body with foot pose regressor. Extensive experiments on the popular benchmarks demonstrate that our method outperforms the state-of-the-art approaches by achieving 40.1mm PA-MPJPE on the 3DPW test set and 43.8mm on the AIST++ test set.