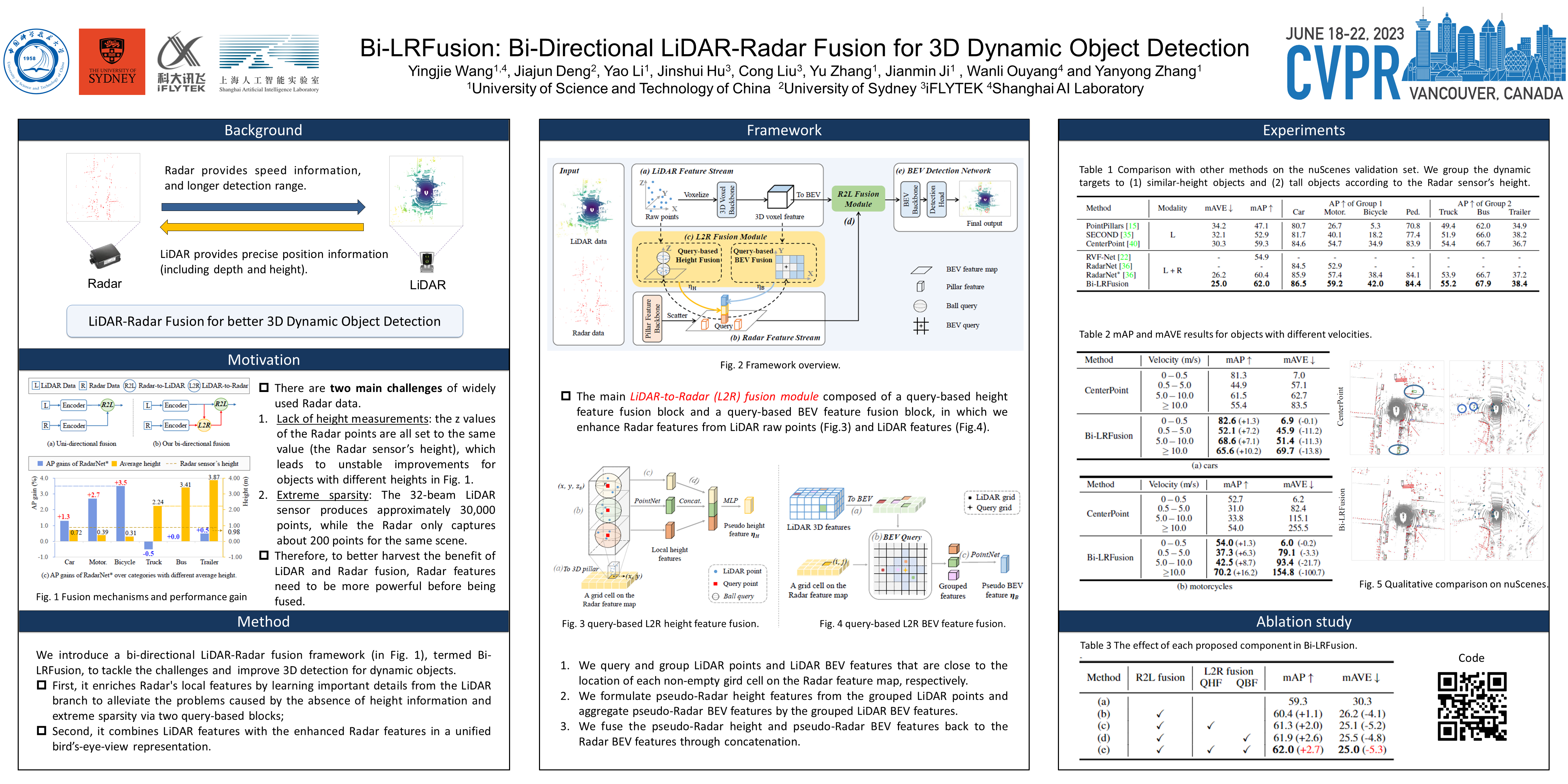
Bi-LRFusion: Bi-Directional LiDAR-Radar Fusion for 3D Dynamic Object Detection
{kind=link}
Abstract
LiDAR and Radar are two complementary sensing approaches in that LiDAR specializes in capturing an object’s 3D shape while Radar provides longer detection ranges as well as velocity hints. Though seemingly natural, how to efficiently combine them for improved feature representation is still unclear. The main challenge arises from that Radar data are extremely sparse and lack height information. Therefore, directly integrating Radar features into LiDAR-centric detection networks is not optimal. In this work, we introduce a bi-directional LiDAR-Radar fusion framework, termed Bi-LRFusion, to tackle the challenges and improve 3D detection for dynamic objects. Technically, Bi-LRFusion involves two steps: first, it enriches Radar’s local features by learning important details from the LiDAR branch to alleviate the problems caused by the absence of height information and extreme sparsity; second, it combines LiDAR features with the enhanced Radar features in a unified bird’s-eye-view representation. We conduct extensive experiments on nuScenes and ORR datasets, and show that our Bi-LRFusion achieves state-of-the-art performance for detecting dynamic objects. Notably, Radar data in these two datasets have different formats, which demonstrates the generalizability of our method. Codes will be published.