Robot Structure Prior Guided Temporal Attention for Camera-to-Robot Pose Estimation From Image Sequence
{kind=link}
Abstract
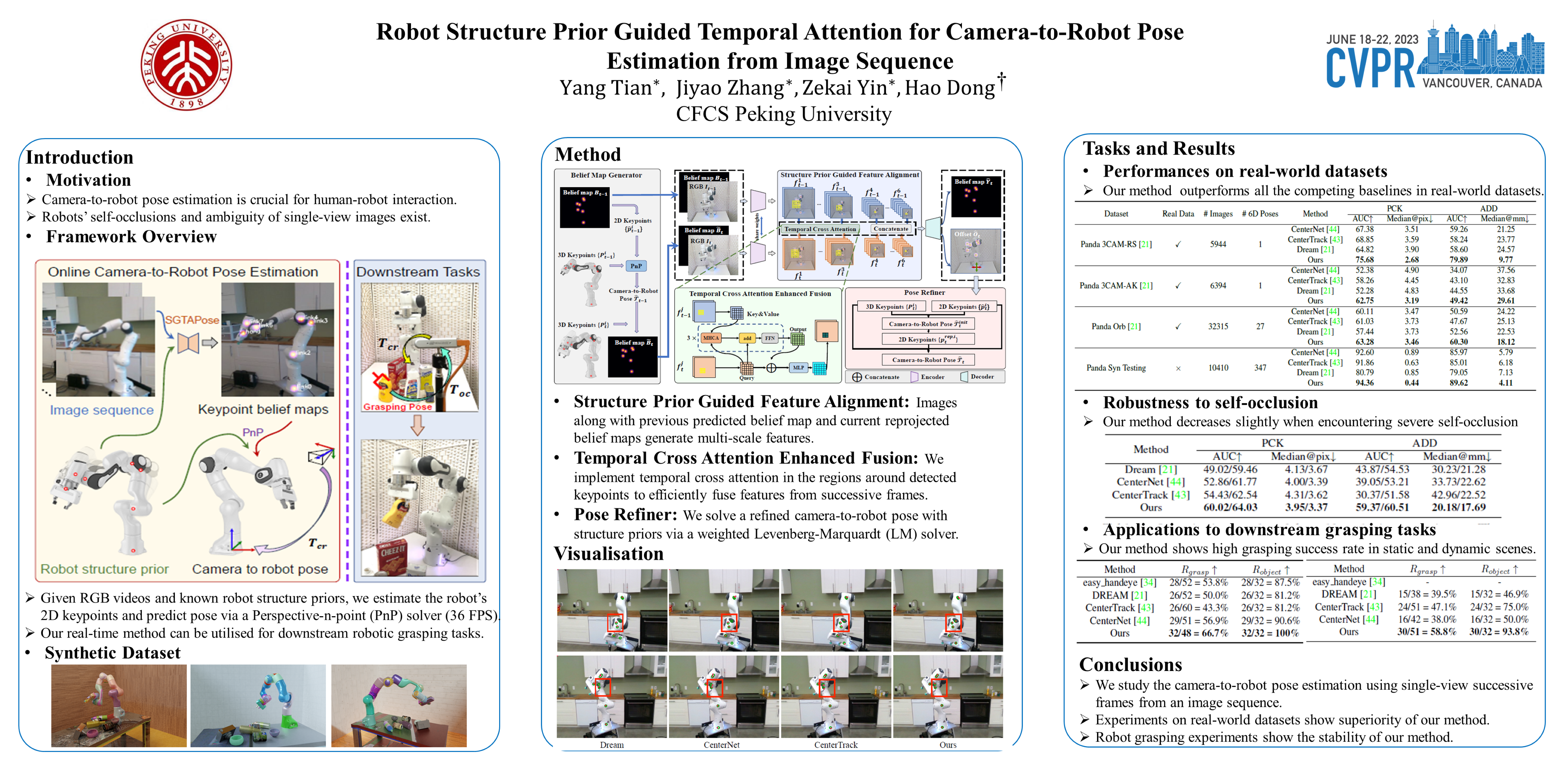
In this work, we tackle the problem of online camera-to-robot pose estimation from single-view successive frames of an image sequence, a crucial task for robots to interact with the world. The primary obstacles of this task are the robot’s self-occlusions and the ambiguity of single-view images. This work demonstrates, for the first time, the effectiveness of temporal information and the robot structure prior in addressing these challenges. Given the successive frames and the robot joint configuration, our method learns to accurately regress the 2D coordinates of the predefined robot’s keypoints (e.g., joints). With the camera intrinsic and robotic joints status known, we get the camera-to-robot pose using a Perspective-n-point (PnP) solver. We further improve the camera-to-robot pose iteratively using the robot structure prior. To train the whole pipeline, we build a large-scale synthetic dataset generated with domain randomisation to bridge the sim-to-real gap. The extensive experiments on synthetic and real-world datasets and the downstream robotic grasping task demonstrate that our method achieves new state-of-the-art performances and outperforms traditional hand-eye calibration algorithms in real-time (36 FPS). Code and data are available at the project page: https://sites.google.com/view/sgtapose.