Symmetric Shape-Preserving Autoencoder for Unsupervised Real Scene Point Cloud Completion
{kind=link}
Abstract
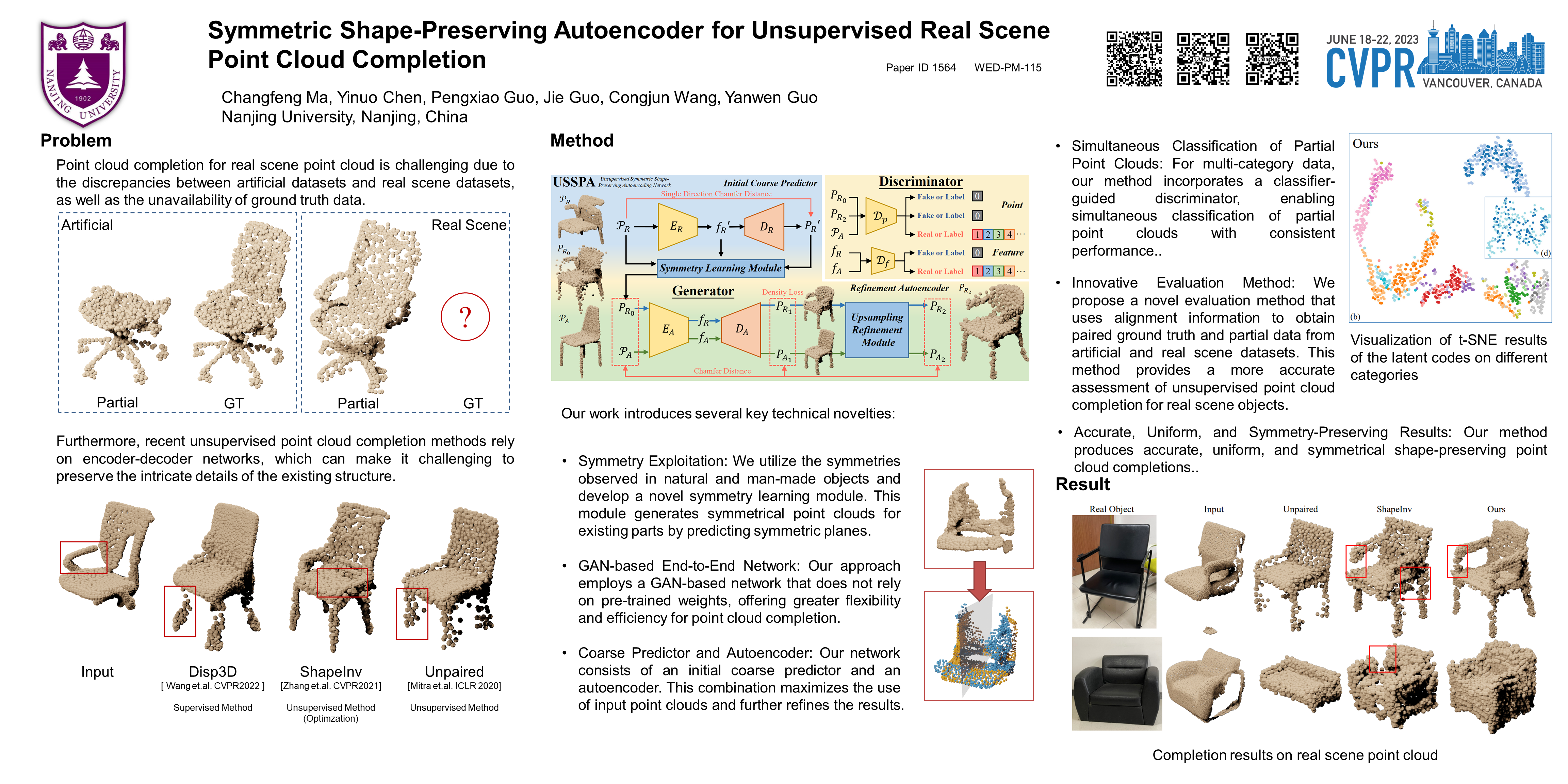
Unsupervised completion of real scene objects is of vital importance but still remains extremely challenging in preserving input shapes, predicting accurate results, and adapting to multi-category data. To solve these problems, we propose in this paper an Unsupervised Symmetric Shape-Preserving Autoencoding Network, termed USSPA, to predict complete point clouds of objects from real scenes. One of our main observations is that many natural and man-made objects exhibit significant symmetries. To accommodate this, we devise a symmetry learning module to learn from those objects and to preserve structural symmetries. Starting from an initial coarse predictor, our autoencoder refines the complete shape with a carefully designed upsampling refinement module. Besides the discriminative process on the latent space, the discriminators of our USSPA also take predicted point clouds as direct guidance, enabling more detailed shape prediction. Clearly different from previous methods which train each category separately, our USSPA can be adapted to the training of multi-category data in one pass through a classifier-guided discriminator, with consistent performance on single category. For more accurate evaluation, we contribute to the community a real scene dataset with paired CAD models as ground truth. Extensive experiments and comparisons demonstrate our superiority and generalization and show that our method achieves state-of-the-art performance on unsupervised completion of real scene objects.