Adversarially Masking Synthetic To Mimic Real: Adaptive Noise Injection for Point Cloud Segmentation Adaptation
{kind=link}
Abstract
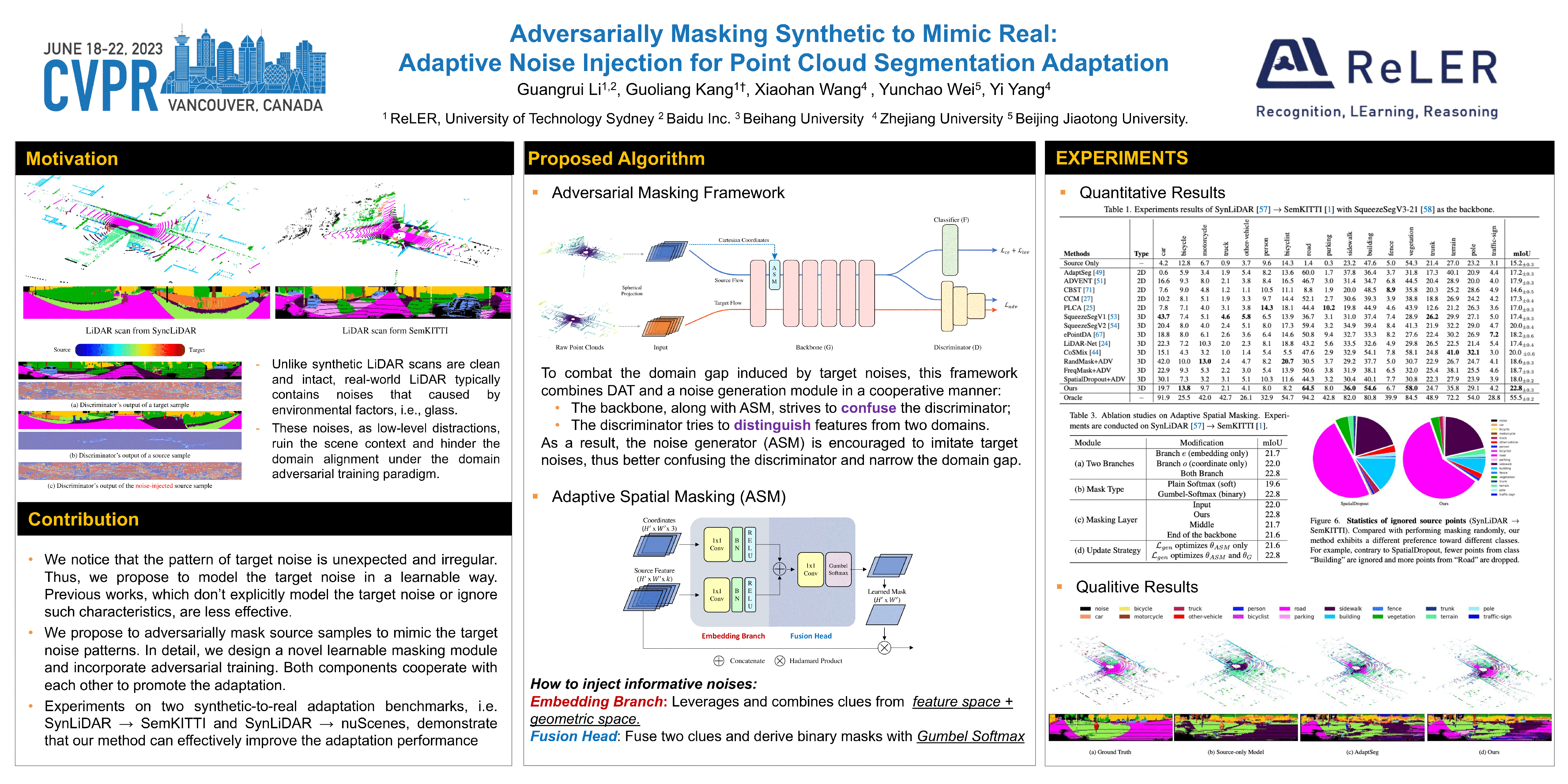
This paper considers the synthetic-to-real adaptation of point cloud semantic segmentation, which aims to segment the real-world point clouds with only synthetic labels available. Contrary to synthetic data which is integral and clean, point clouds collected by real-world sensors typically contain unexpected and irregular noise because the sensors may be impacted by various environmental conditions. Consequently, the model trained on ideal synthetic data may fail to achieve satisfactory segmentation results on real data. Influenced by such noise, previous adversarial training methods, which are conventional for 2D adaptation tasks, become less effective. In this paper, we aim to mitigate the domain gap caused by target noise via learning to mask the source points during the adaptation procedure. To this end, we design a novel learnable masking module, which takes source features and 3D coordinates as inputs. We incorporate Gumbel-Softmax operation into the masking module so that it can generate binary masks and be trained end-to-end via gradient back-propagation. With the help of adversarial training, the masking module can learn to generate source masks to mimic the pattern of irregular target noise, thereby narrowing the domain gap. We name our method “Adversarial Masking” as adversarial training and learnable masking module depend on each other and cooperate with each other to mitigate the domain gap. Experiments on two synthetic-to-real adaptation benchmarks verify the effectiveness of the proposed method.