Unifying Top-down and Bottom-up Scanpath Prediction Using Transformers
{kind=link}
Abstract
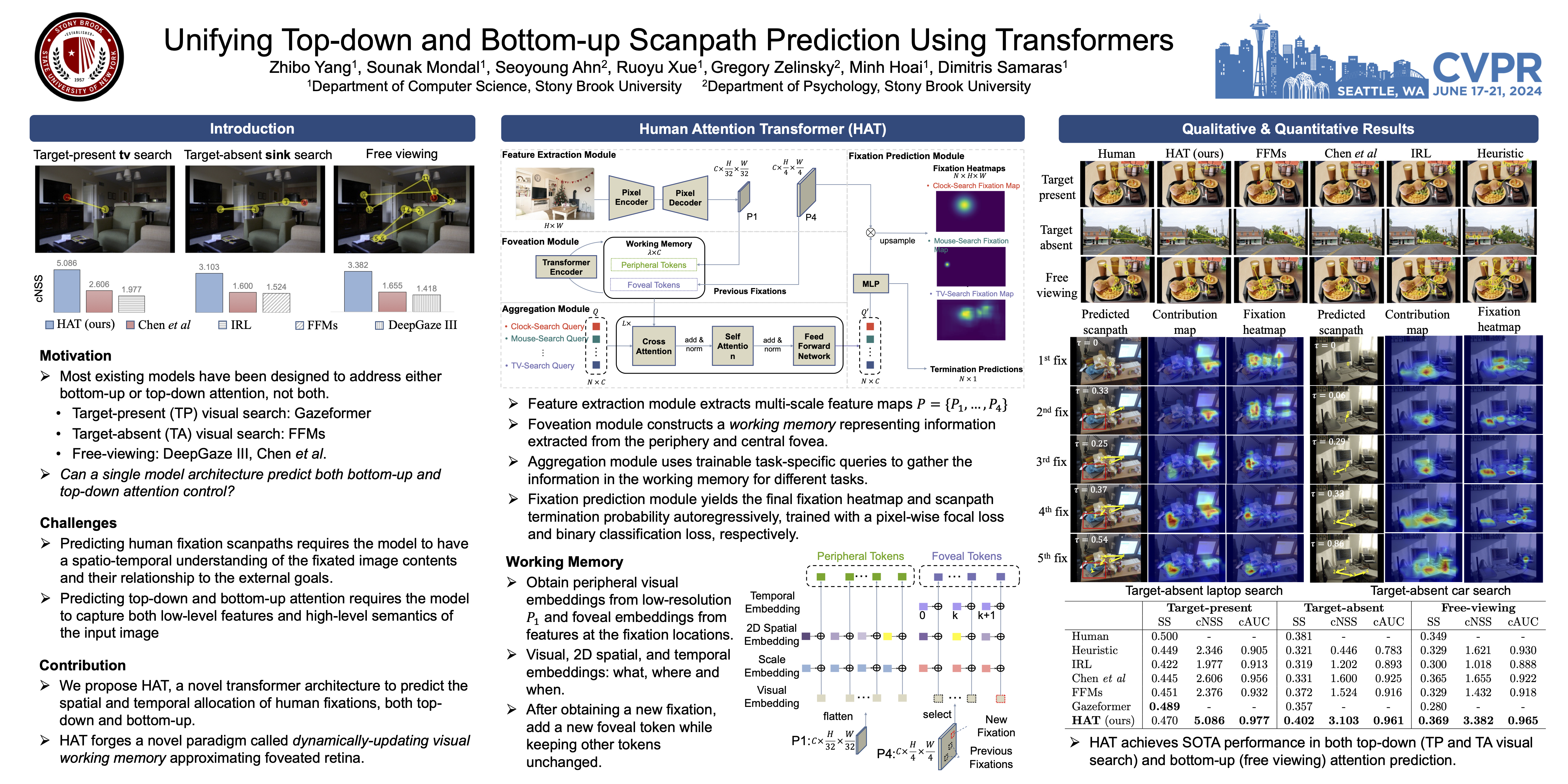
Most models of visual attention aim at predicting either top-down or bottom-up control, as studied using different visual search and free-viewing tasks. In this paper we propose the Human Attention Transformer (HAT), a single model that predicts both forms of attention control. HAT uses a novel transformer-based architecture and a simplified foveated retina that collectively create a spatio-temporal awareness akin to the dynamic visual working memory of humans. HAT not only establishes a new state-of-the-art in predicting the scanpath of fixations made during target-present and target-absent visual search and "taskless" free viewing, but also makes human gaze behavior interpretable. Unlike previous methods that rely on a coarse grid of fixation cells and experience information loss due to fixation discretization, HAT features a sequential dense prediction architecture and outputs a dense heatmap for each fixation, thus avoiding discretizing fixations. HAT sets a new standard in computational attention, which emphasizes effectiveness, generality, and interpretability. HAT's demonstrated scope and applicability will likely inspire the development of new attention models that can better predict human behavior in various attention-demanding scenarios.