Point2RBox: Combine Knowledge from Synthetic Visual Patterns for End-to-end Oriented Object Detection with Single Point Supervision
{kind=link}
Abstract
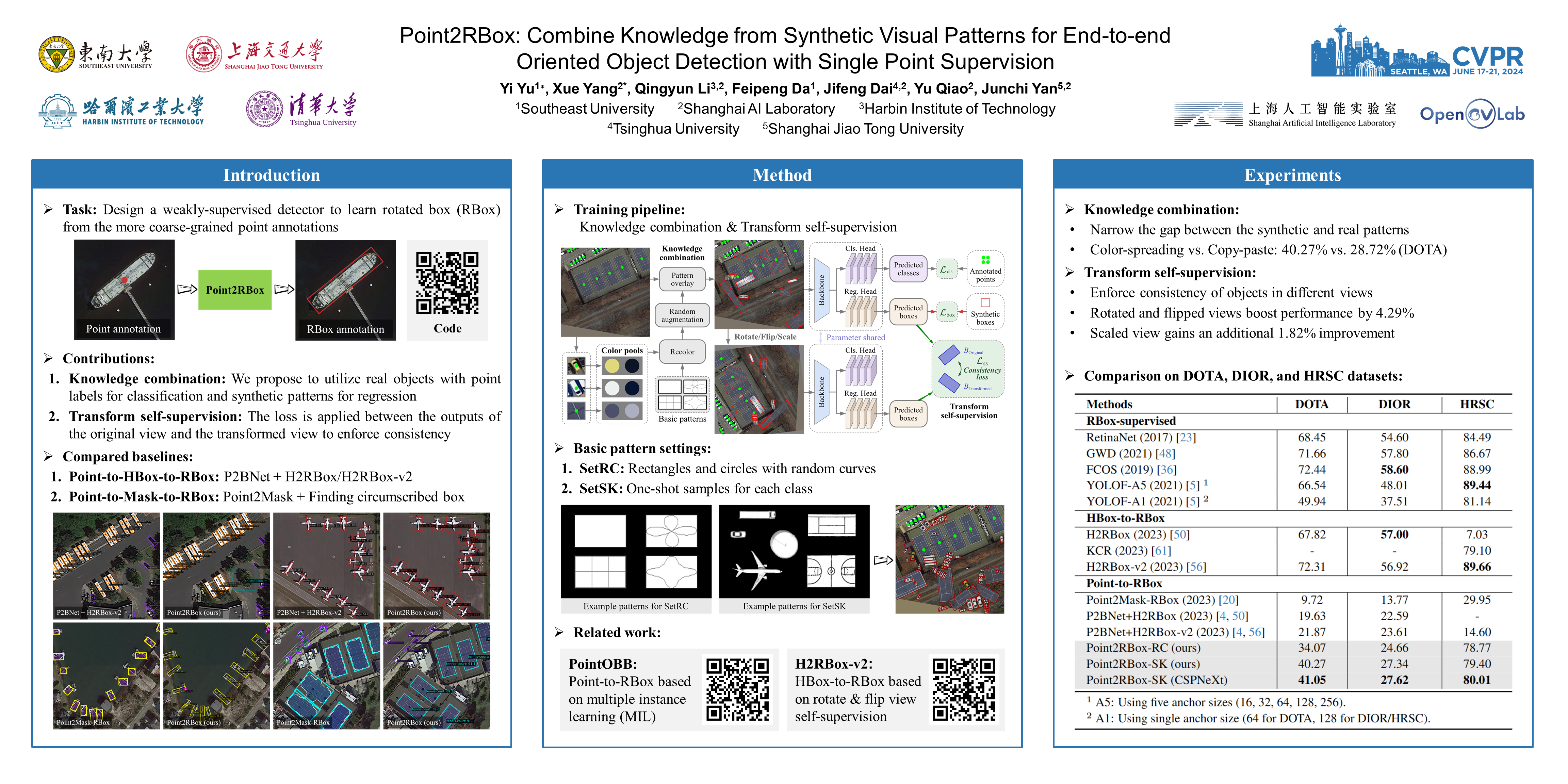
With the rapidly increasing demand for oriented object detection (OOD), recent research involving weakly-supervised detectors for learning rotated box (RBox) from the horizontal box (HBox) has attracted more and more attention. In this paper, we explore a more challenging yet label-efficient setting, namely single point-supervised OOD, and present our approach called Point2RBox. Specifically, we propose to leverage two principles: 1) Synthetic pattern knowledge combination: By sampling around each labeled point on the image, we spread the object feature to synthetic visual patterns with known boxes to provide the knowledge for box regression. 2) Transform self-supervision: With a transformed input image (e.g. scaled/rotated), the output RBoxes are trained to follow the same transformation so that the network can perceive the relative size/rotation between objects. The detector is further enhanced by a few devised techniques to cope with peripheral issues, e.g. the anchor/layer assignment as the size of the object is not available in our point supervision setting. To our best knowledge, Point2RBox is the first end-to-end solution for point-supervised OOD. In particular, our method uses a lightweight paradigm, yet it achieves a competitive performance among point-supervised alternatives, 41.05%/27.62%/80.01% on DOTA/DIOR/HRSC datasets.