Flexible Depth Completion for Sparse and Varying Point Densities
{kind=link}
Abstract
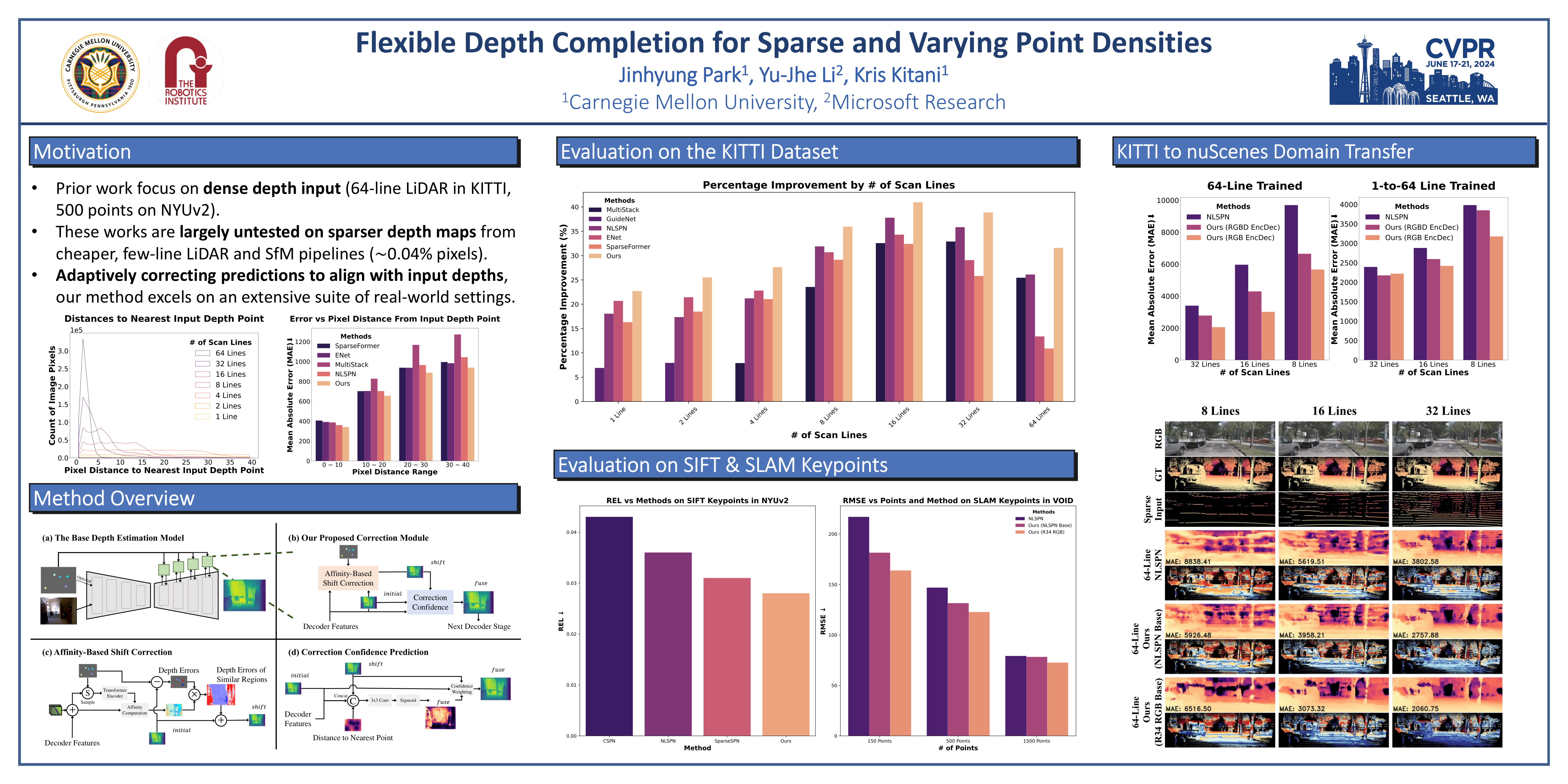
While recent depth completion methods have achieved remarkable results filling in relatively dense depth maps (e.g., projected 64-line LiDAR on KITTI or 500 sampled points on NYUv2) with RGB guidance, their performance on very sparse input (e.g., 4-line LiDAR or 32 depth point measurements) is unverified. These sparser regimes present new challenges, as a 4-line LiDAR increases the distance between pixels without depth and their nearest depth point sixfold from 5 pixels to 30 pixels compared to 64 lines. Observing that existing methods struggle with sparse and variable distribution depth maps, we propose an Affinity-Based Shift Correction (ASC) module that iteratively aligns depth predictions to input depth based on predicted affinities between image pixels and depth points. Our framework enables each depth point to adaptively influence and improve predictions across the image, leading to largely improved results for fewer-line, fewer-point, and variable sparsity settings. Further, we show improved performance in domain transfer from KITTI to nuScenes and from random sampling to irregular point distributions. Our correction module can easily be added to any depth completion or RGB-only depth estimation model, notably allowing the latter to perform both completion and estimation with a single model.