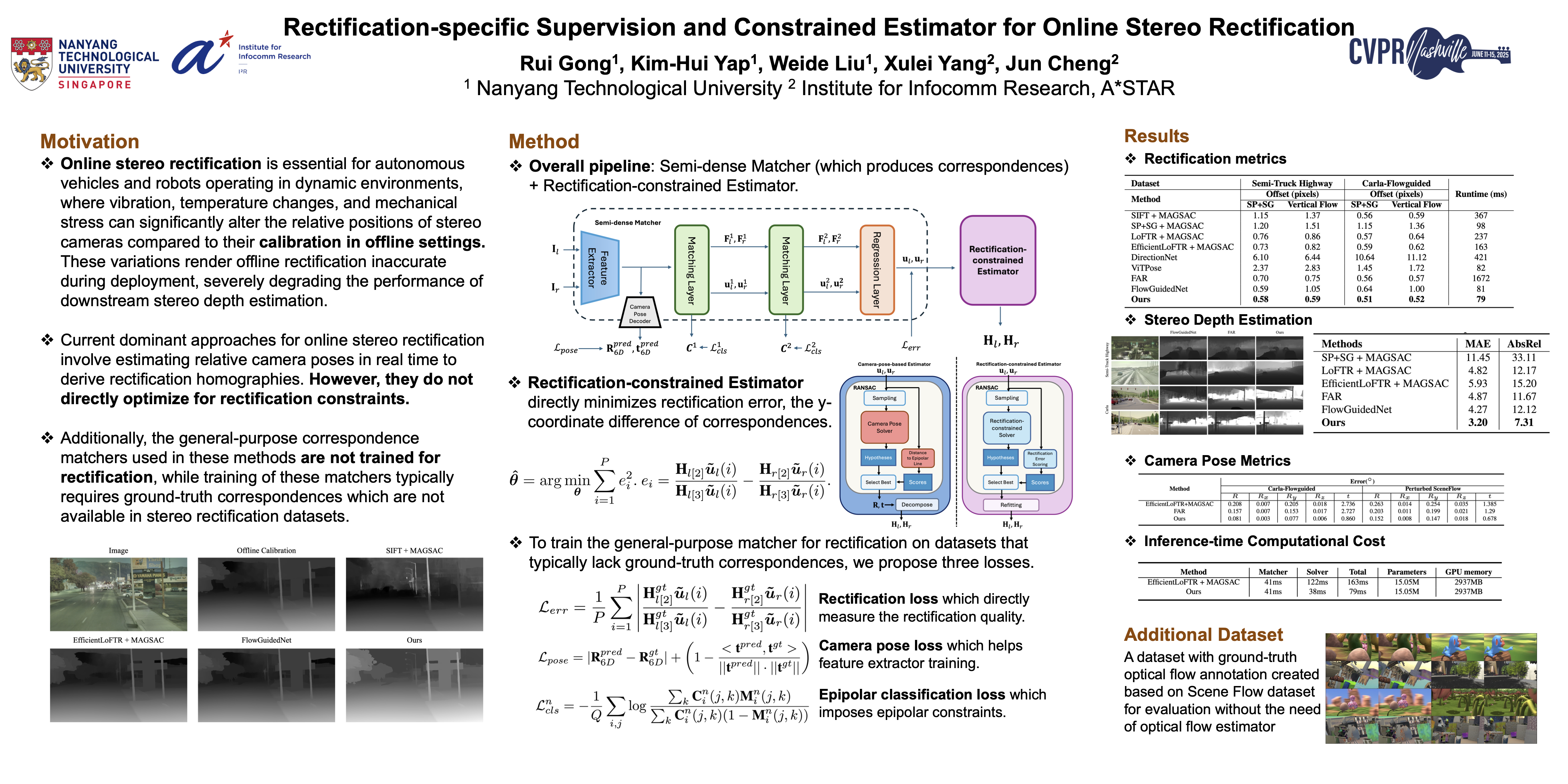
Rectification-specific Supervision and Constrained Estimator for Online Stereo Rectification
Rui Gong ⋅ Kim-Hui Yap ⋅ Weide Liu ⋅ Xulei Yang ⋅ Jun Cheng
2025 Poster
{kind=link}
Abstract
Online stereo rectification is critical for autonomous vehicles and robots in dynamic environments, where factors such as vibration, temperature fluctuations, and mechanical stress can affect rectification accuracy and severely degrade downstream stereo depth estimation. Current dominant approaches for online stereo rectification involve estimating relative camera poses in real time to derive rectification homographies. However, they do not directly optimize for rectification constraints, which leads to a gap. Additionally, the general-purpose correspondence matchers used in these methods are not trained for stereo rectification, while training of these matchers typically requires ground-truth correspondences which are not available in stereo rectification datasets. To address these limitations, we propose a matching-based stereo rectification framework that is directly optimized for rectification and does not require ground-truth correspondence annotations for training. Our framework incorporates a rectification-constrained estimator and applies multi-level, rectification-specific supervision that trains the matcher network for rectification without relying on ground-truth correspondences. Additionally, we create a new rectification dataset with ground-truth optical flow annotations, eliminating bias from evaluation metrics used in prior work that relied on pretrained keypoint matching or optical flow models. Extensive experiments show that our approach outperforms both state-of-the-art matching-based and matching-free methods in vertical flow metric by $10.7$% on the Carla dataset and $21.3$% on the Semi-Truck Highway dataset, offering superior rectification accuracy. The codes and the created dataset will be released once the paper is published.
Chat is not available.
Successful Page Load