V2X-R: Cooperative LiDAR-4D Radar Fusion with Denoising Diffusion for 3D Object Detection
{kind=link}
Abstract
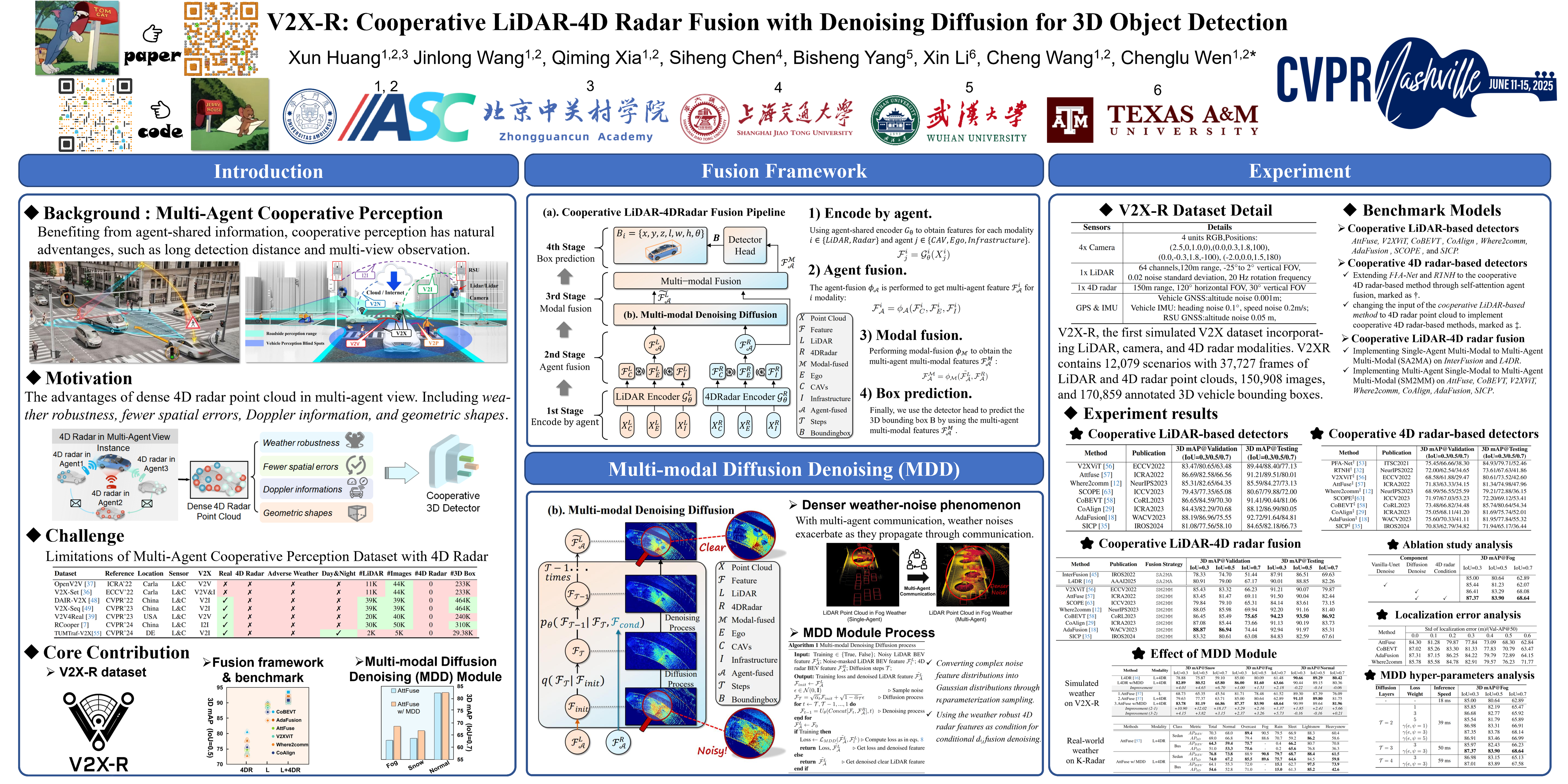
Current Vehicle-to-Everything (V2X) systems have significantly enhanced 3D object detection using LiDAR and camera data. However, they face performance degradation in adverse weather. Weather-robust 4D radar, with Doppler velocity and additional geometric information, offers a promising solution to this challenge. To this end, we present V2X-R, the first simulated V2X dataset incorporating LiDAR, camera, and 4D radar modalities. V2X-R contains 12,079 scenarios with 37,727 frames of LiDAR and 4D radar point clouds, 150,908 images, and 170,859 annotated 3D vehicle bounding boxes. Subsequently, we propose a novel cooperative LiDAR-4D radar fusion pipeline for 3D object detection and implement it with multiple fusion strategies. To achieve weather-robust detection, we additionally propose a Multi-modal Denoising Diffusion (MDD) module in our fusion pipeline. MDD utilizes weather-robust 4D radar feature as a condition to guide the diffusion model in denoising noisy LiDAR features.Experiments show that our LiDAR-4D radar fusion pipeline demonstrates superior performance in the V2X-R dataset. Over and above this, our MDD module further improved the foggy/snowy performance of the basic fusion model by up to 5.73\%/6.70\% and barely disrupting normal performance. The dataset and code will be publicly available.