Consistent Normal Orientation for 3D Point Clouds via Least Squares on Delaunay Graph
{kind=link}
Abstract
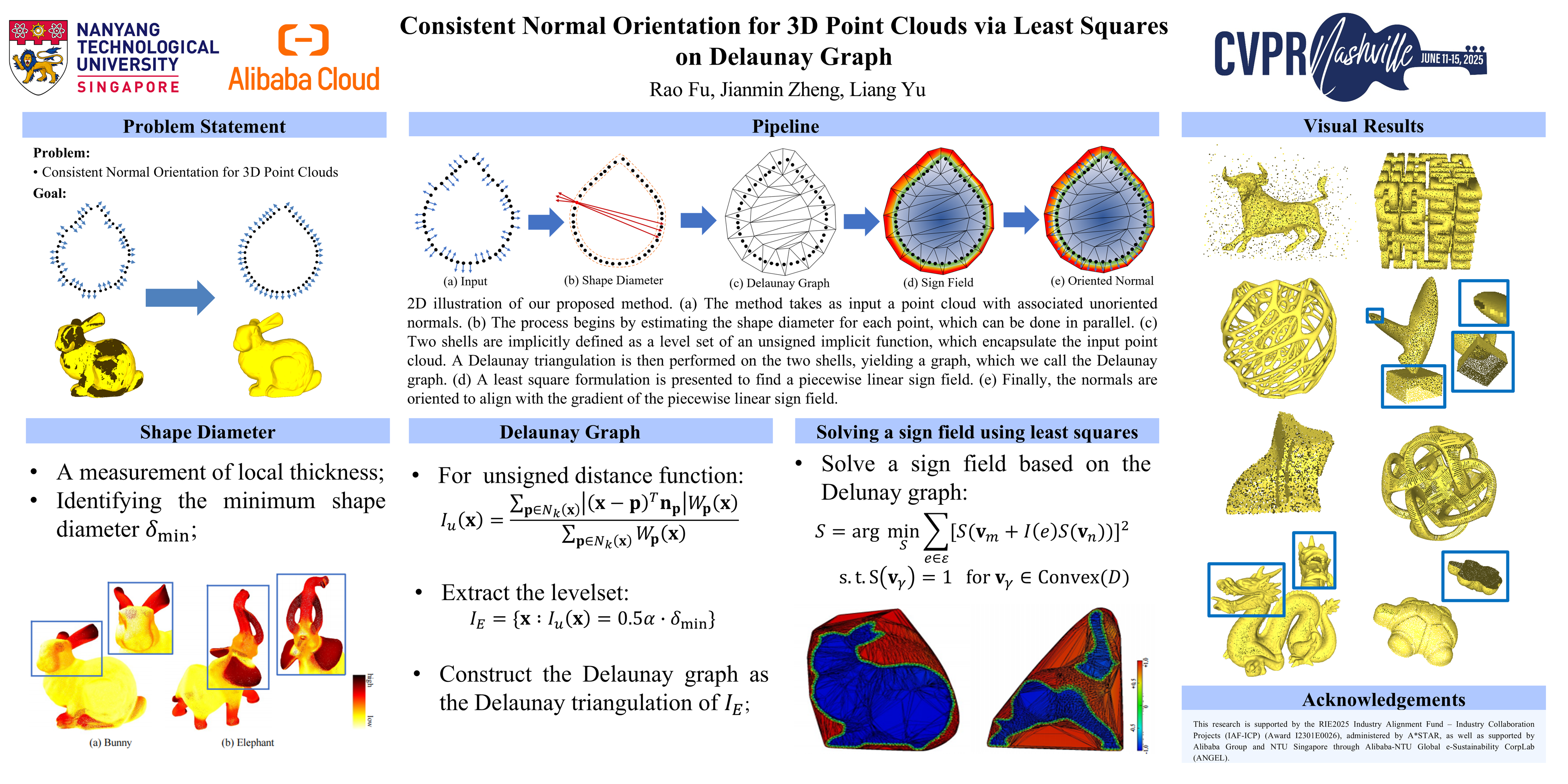
The orientation of surface normals in 3D point cloud is a fundamental problem in computer vision and graphics. Determining a globally consistent orientation solely from the point cloud is however challenging due to the global scope of the problem and the discrete nature of point cloud, particularly in the presence of noise, outliers, holes, thin structures, and complex topologies.This paper presents an efficient, robust, and global algorithm for generating consistent normal orientation of a dense 3D point cloud. The basic idea is to transform the original binary normal orientation problem to finding a relaxed sign field on a Delaunay graph, which can be achieved by solving a sparse linear system. The Delaunay graph is constructed by triangulating a level set of an implicit function defined from the input point cloud. The shape diameter function is estimated to serve as a prior for determining an appropriate level value such that the level set implicitly defines the inner and outer shells enclosing the input point clouds. As such, our algorithm leverages the strengths of the shape diameter function, Delaunay triangulation, and the least-square techniques, making the underlying processes take both geometry and topology into consideration, and thus provides an efficient and robust solution for handling point clouds with complicated geometry and topology. Extensive experiments on various shapes with noise and outliers confirm the effectiveness and robustness of our algorithm.