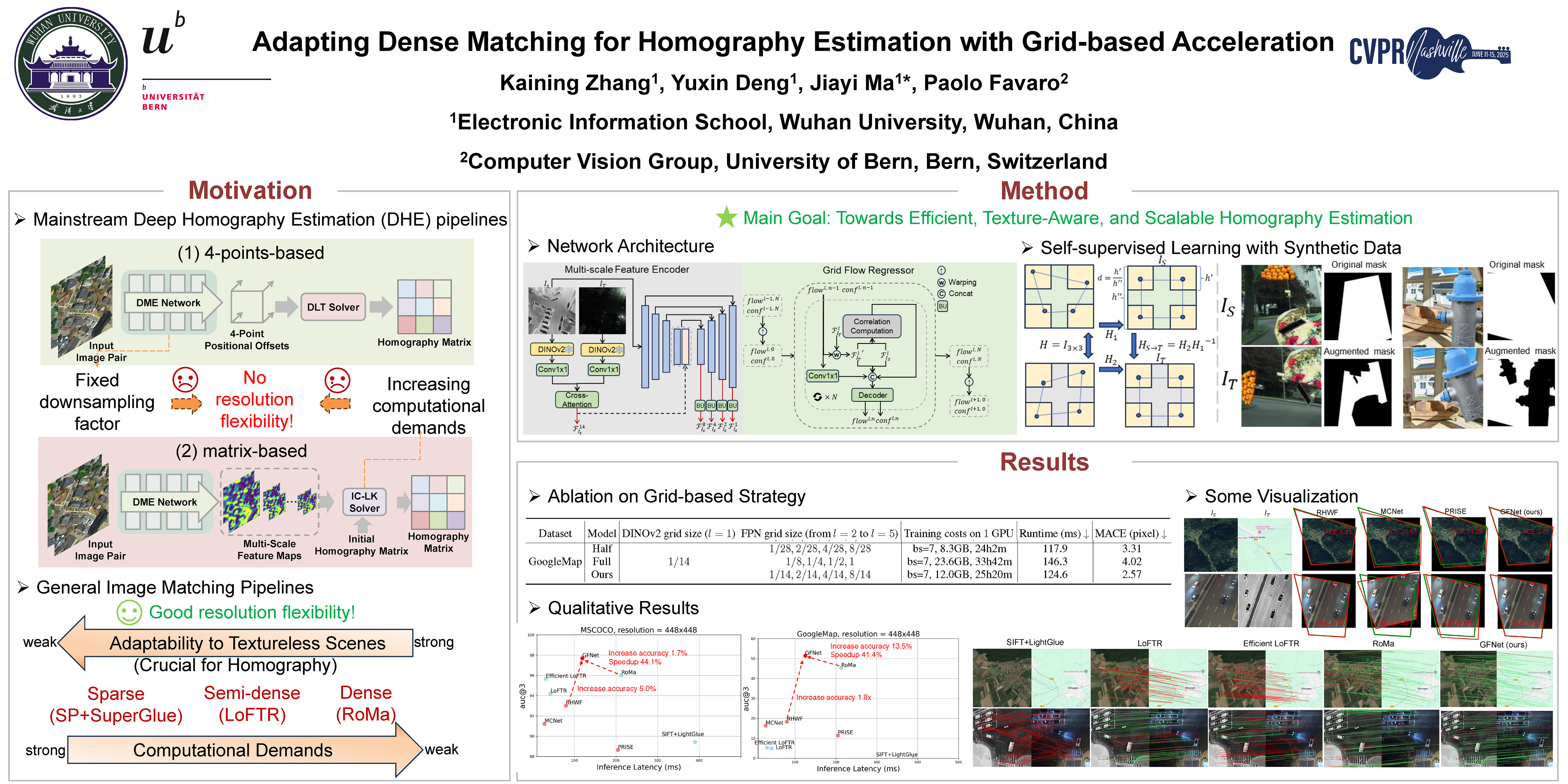
Adapting Dense Matching for Homography Estimation with Grid-based Acceleration
Kaining Zhang ⋅ Yuxin Deng ⋅ Jiayi Ma ⋅ Paolo Favaro
2025 Poster
{kind=link}
Abstract
Current deep homography estimation methods are constrained to processing low-resolution image pairs due to network architecture and computational limitations. For high-resolution images, downsampling is often required, which can greatly degrade estimation accuracy. In contrast, traditional methods, which match pixels and compute homography from correspondences, provide greater resolution flexibility. So in this work, we go back to the traditional ways for homography estimation. Specifically, we propose GFNet, a Grid Flow regression Network that adapts the high-accuracy dense matching framework for homography estimation and enhances efficiency with a grid-based strategy—estimating flow only over a coarse grid by leveraging homography’s global smoothness. We demonstrate the effectiveness of GFNet on a wide range of experiments on multiple datasets, including the common scene MSCOCO, multimodal datasets VIS-IR and GoogleMap, and the dynamic scene VIRAT. Specifically, on 448$\times$448 GoogleMap, GFNet achieves an improvement of +9.9\% in auc@3 while reducing MACs by $\sim$47\% compared to the SOTA dense matching method. Additionally, it shows a 1.7$\times$ improvement in auc@3 over the SOTA deep homography method.
Chat is not available.
Successful Page Load