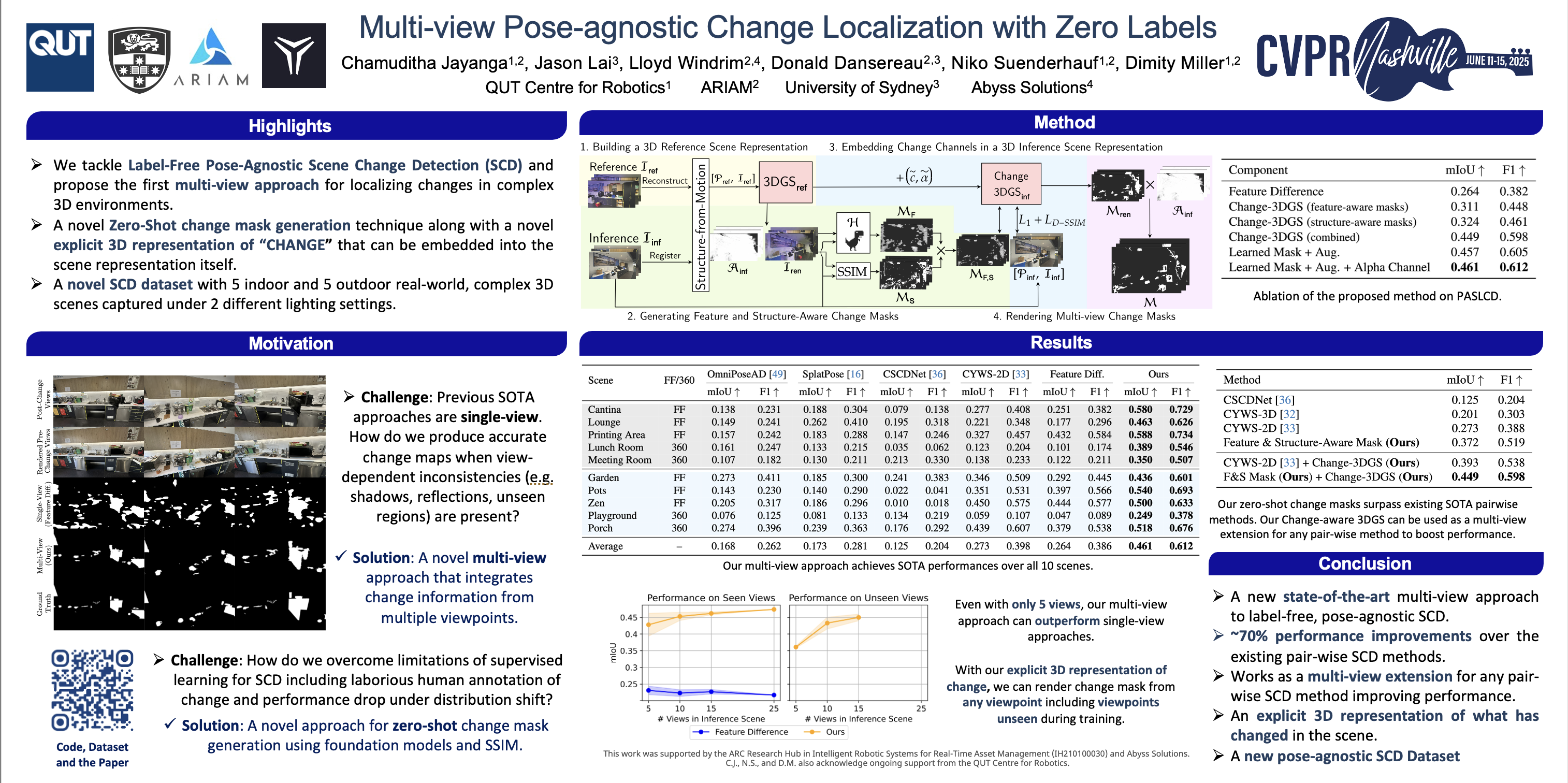
Multi-View Pose-Agnostic Change Localization with Zero Labels
Chamuditha Jayanga Galappaththige ⋅ Jason Lai ⋅ Lloyd Windrim ⋅ Donald G. Dansereau ⋅ Niko Suenderhauf ⋅ Dimity Miller
2025 Poster
{kind=link}
Abstract
Autonomous agents often require accurate methods for detecting and localizing changes in their environment, particularly when observations are captured from unconstrained and inconsistent viewpoints. We propose a novel label-free, pose-agnostic change detection method that integrates information from multiple viewpoints to construct a change-aware 3D Gaussian Splatting (3DGS) representation of the scene. With as few as 5 images of the post-change scene, our approach can learn additional change channels in a 3DGS and produce change masks that outperform single-view techniques. Our change-aware 3D scene representation additionally enables the generation of accurate change masks for unseen viewpoints. Experimental results demonstrate state-of-the-art performance in complex multi-object scenes, achieving a 1.7$\times$ and 1.6$\times$ improvement in Mean Intersection Over Union and F1 score respectively over other baselines. We also contribute a new real-world dataset to benchmark change detection in diverse challenging scenes in the presence of lighting variations. Our code and dataset will be made publicly available upon acceptance.
Chat is not available.
Successful Page Load