Shift the Lens: Environment-Aware Unsupervised Camouflaged Object Detection
{kind=link}
Abstract
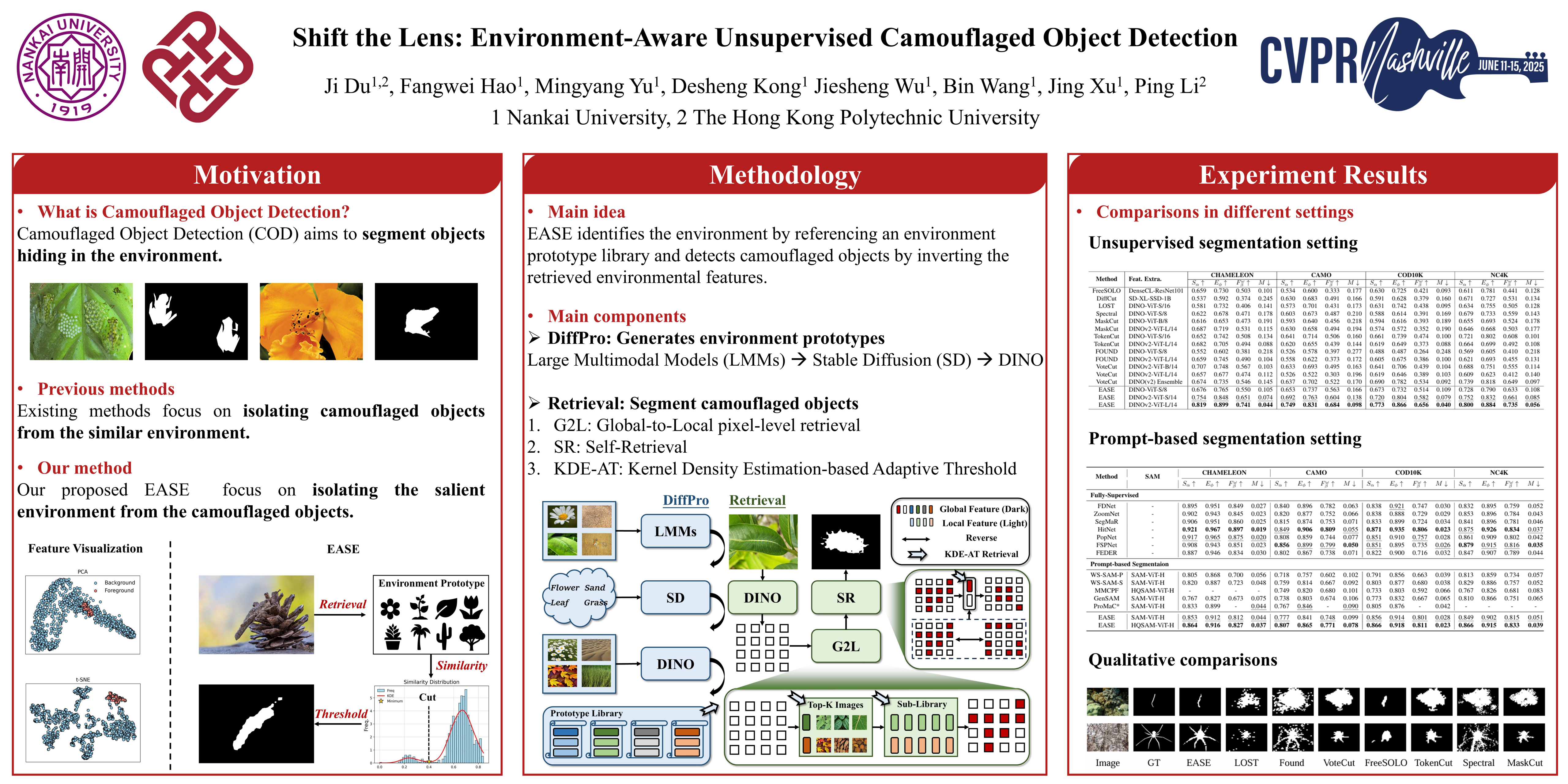
Camouflaged Object Detection (COD) seeks to distinguish objects from their highly similar backgrounds. Existing work has essentially focused on isolating camouflaged objects from the environment, demonstrating ever-improving performance but at the cost of extensive annotations and complex optimizations. In this paper, we diverge from this paradigm and shift the lens to isolating the salient environment from the camouflaged object. We introduce EASE, an Environment-Aware unSupErvised COD framework that identifies the environment by referencing an environment prototype library and detects camouflaged objects by inverting the retrieved environmental features. Specifically, our approach (DiffPro) uses large multimodal models, diffusion models, and vision-foundation models to construct the environment prototype library. To retrieve environments from the library and refrain from confusing foreground and background, we incorporate three retrieval schemes: Kernel Density Estimation-based Adaptive Threshold (KDE-AT), Global-to-Local pixel-level retrieval (G2L), and Self-Retrieval (SR). Our experiments demonstrate significant improvements over current unsupervised methods, with EASE achieving an average gain of over 10\% on the COD10K dataset. When integrated with SAM, EASE surpasses prompt-based segmentation approaches and performs competitively with state-of-the-art fully-supervised methods.