DV-Matcher: Deformation-based Non-rigid Point Cloud Matching Guided by Pre-trained Visual Features
{kind=link}
Abstract
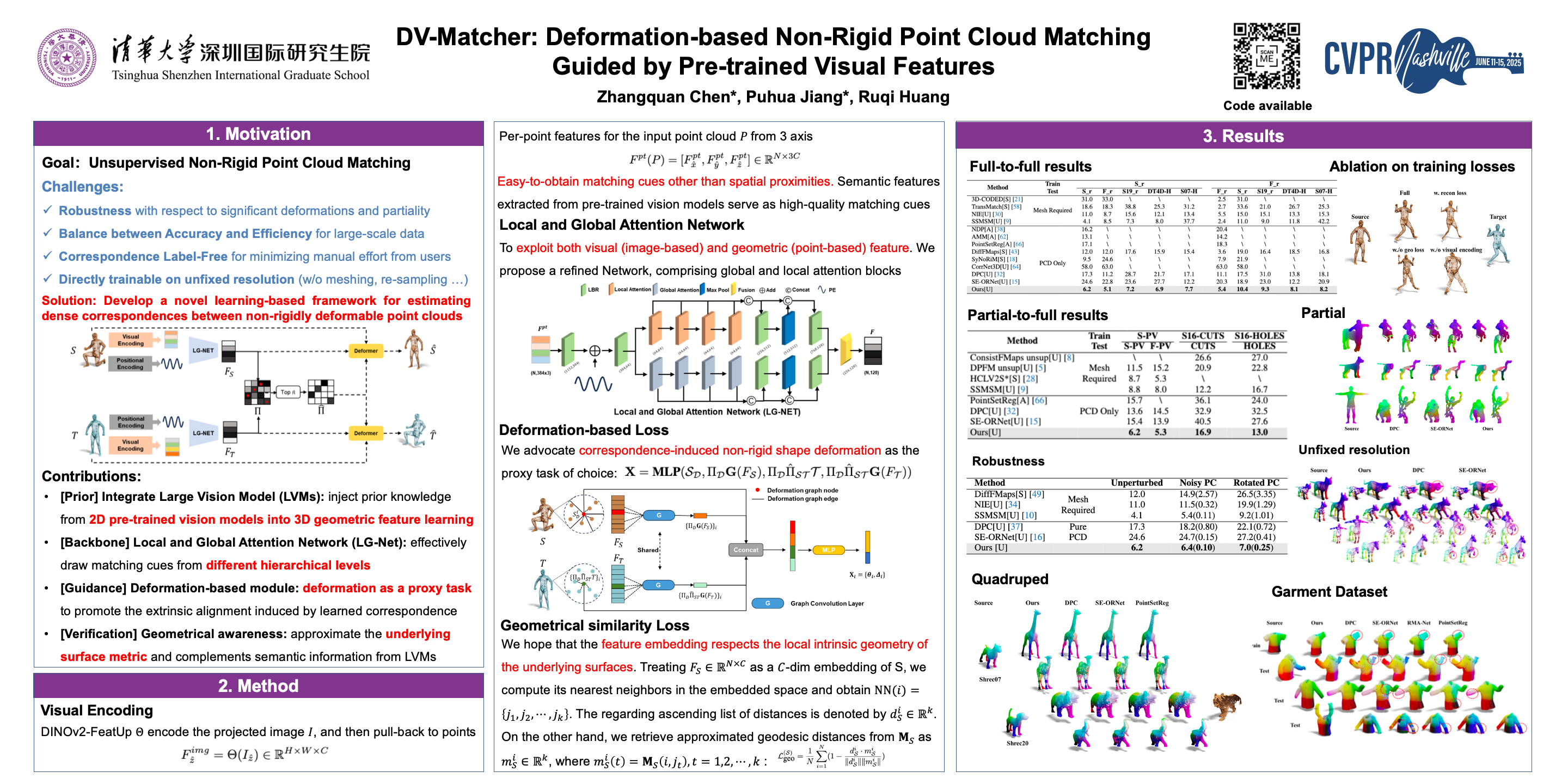
In this paper, we present DV-Matcher, a novel learning-based framework for estimating dense correspondences between non-rigidly deformable point clouds. Learning directly from unstructured point clouds without meshing or manual labelling, our framework delivers high-quality dense correspondences, which is of significant practical utility in point cloud processing. Our key contributions are two-fold: First, we propose a scheme to inject prior knowledge from pre-trained vision models into geometric feature learning, which effectively complements the local nature of geometric features with global and semantic information; Second, we propose a novel deformation-based module to promote the extrinsic alignment induced by the learned correspondences, which effectively enhances the feature learning. Experimental results show that our method achieves state-of-the-art results in matching non-rigid point clouds in both near-isometric and heterogeneous shape collection as well as more realistic partial and noisy data.