iG-6DoF: Model-free 6DoF Pose Estimation for Unseen Object via Iterative 3D Gaussian Splatting
{kind=link}
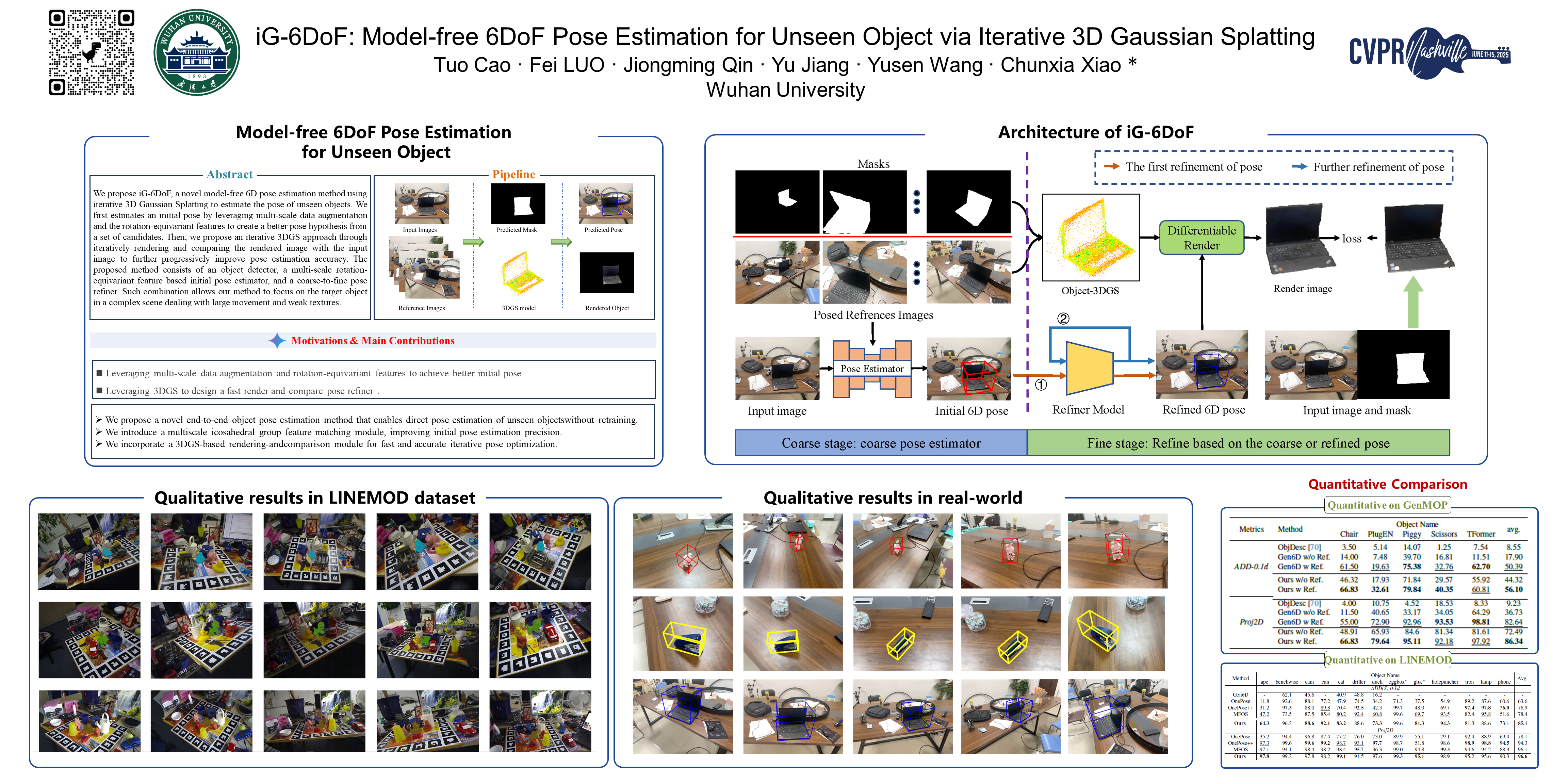
Abstract
Traditional methods in pose estimation often rely on precise 3D models or additional data such as depth and normals, limiting their generalization, especially when objects undergo large translations or rotations. We propose iG-6DoF, a novel model-free 6D pose estimation method iterative 3D Gaussian Splatting to estimate the pose of unseen objects. We first estimates an initial pose by leveraging multi-scale data augmentation and the rotation-equivariant features to create a better pose hypothesis from a set of candidates. Then, we propose an iterative 3DGS approach through iteratively rendering and comparing the rendered image with the input image to further progressively improve pose estimation accuracy. The proposed end-to-end network consists of an object detector, a multi-scale rotation-equivariant feature based initial pose estimator, and a coarse-to-fine pose refiner. Such combination allows our method to focus on the target object in a complex scene and deal with large movement and weak textures.Such framework allows to deal with large movement and weak texture and complex scene. We conduct extensive experiments on benchmark and real datasets. Our method achieves state-of-the-art results on the LINEMOD, OnePose-LowTexture, and GenMOP datasets, demonstrating its strong generalization to unseen objects and robustness across various scenes.