DIO: Decomposable Implicit 4D Occupancy-Flow World Model
{kind=link}
Abstract
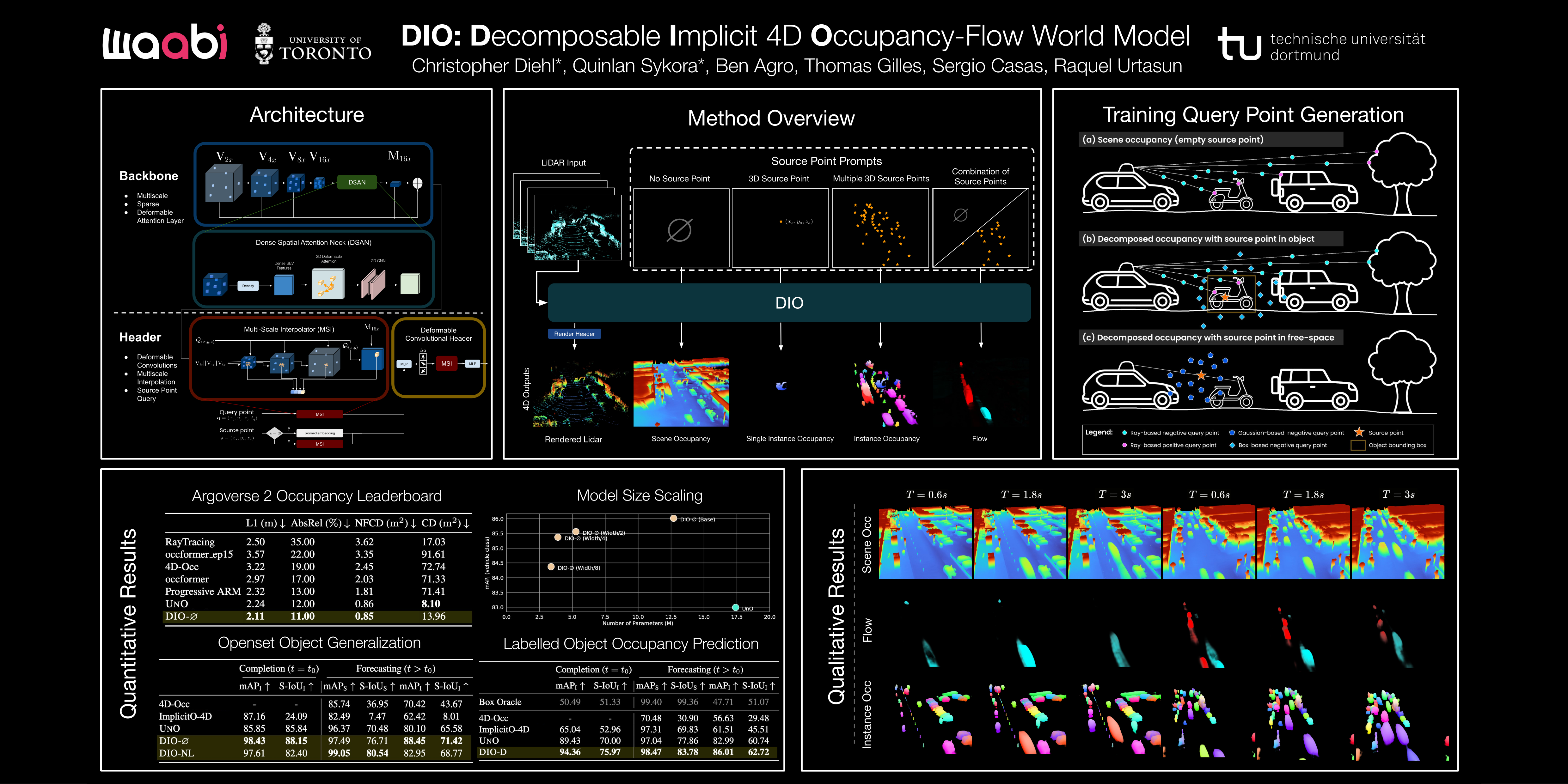
We present DIO, a flexible world model that can estimate the scene occupancy-flow from a sparse set of LiDAR observations, and decompose it into individual instances. DIO can not only complete instance shapes at the present time, but also forecast their occupancy-flow evolution over a future horizon. Thanks to its flexible prompt representation, DIO can take instance prompts from off-the-shelf models like 3D detectors, achieving state-of-the-art performance in the task of 4D semantic occupancy completion and forecasting on the Argoverse 2 dataset. Moreover, our world model can easily and effectively be transferred to downstream tasks like LiDAR point cloud forecasting, ranking first compared to all baselines in the Argoverse 4D occupancy forecasting challenge.